



















14 - 53
Chapter 14 Common Functions
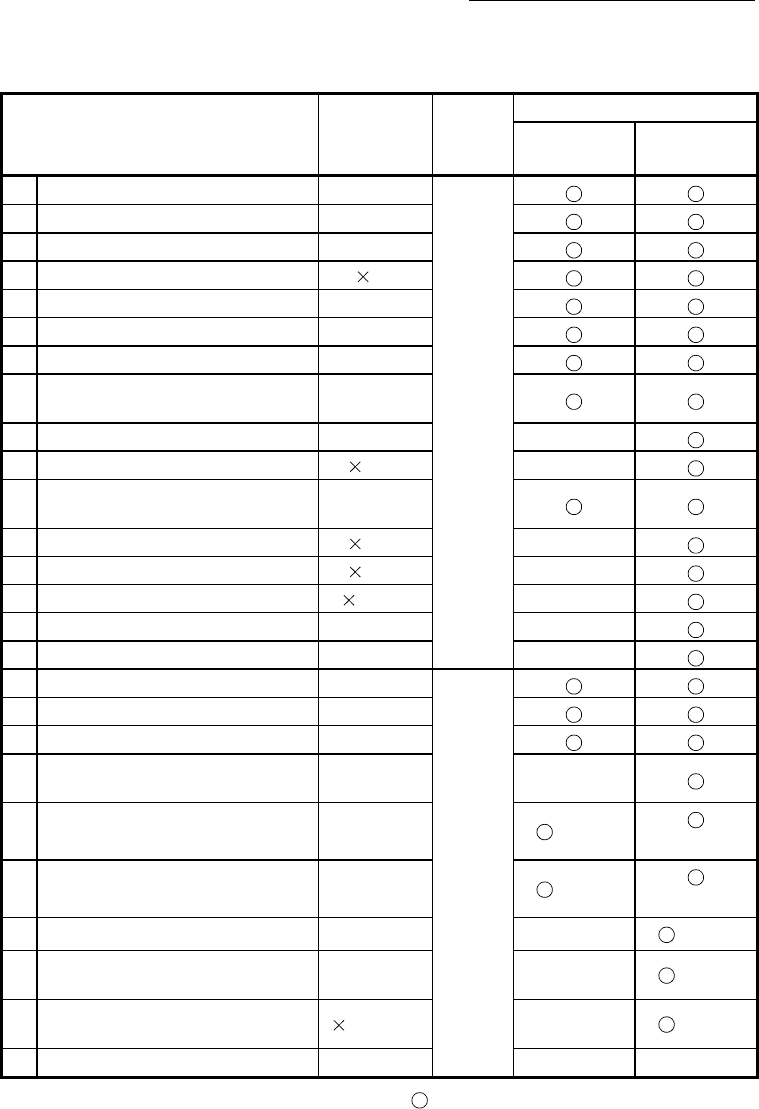
[1] Data that can be set
Data type Unit
Used
point
Monitoring possibility
MR-J3(W)-B MR-J4(W)-B/
MR-JE-B
1 Effective load ratio [%]
1 word
2 Regenerative load ratio [%]
3 Peak load factor [%]
4 Load inertia moment ratio [ 0.1]
5 Model loop gain [rad/s]
6 Bus voltage [V]
7 Servo motor rotation speed [r/min]
8
Encoder multiple revolution
counter
[rev]
9 Module power consumption [W] —
10 Instantaneous torque [ 0.1%] —
12
Servomotor thermistor
temperature
[°C]
13 Equivalent disturbance torque [ 0.1%] —
14 Overload alarm margin [ 0.1%] —
15 Error excessive alarm margin [ 16PLS] —
16 Settling time [ms] —
17 Overshoot amount [PLS] —
20 Position feedback [PLS]
2 words
21 Encoder single revolution position [PLS]
22 Selection droop pulse [PLS]
23
Module integral power
consumption
[Wh] —
24 Load side encoder information 1 [PLS]
(Note-4)
(Note-4), (Note-5)
25 Load side encoder information 2 —
(Note-4)
(Note-4), (Note-5)
26 Z-phase counter [PLS] —
(Note-3)
27
Servomotor-side /load-side
position deviation
[PLS] —
(Note-4)
28
Servomotor-side/load-side speed
deviation
[ 0.01r/min] —
(Note-4)
29 Encoder counter [PLS] — —
: Possible, — : Not possible ("0" is stored.)
(Note-1): The motor speed that took the average every 227[ms].
Use the servo amplifiers of version compatible with the monitor of motor speed.
Always "0" if the monitor is executed for the servo amplifier which does not support this
function.
(Note-2): The data set to "Droop pulse monitor selection for controller display" of "
Fully closed loop
function selection 3
(PE10)" is monitored.
(Note-3): It can be monitored when using the linear servo motors.
(Note-4): It can be monitored when using the fully closed control.
(Note-5): It can be monitored when using the synchronous encoder via servo amplifier.
Refer to each servo amplifier instruction manual for details of the data monitored.