



















6 - 22
Chapter 6 Sequence Program Used for Positioning Control
*
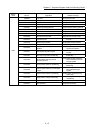
* No.21 Continuous operation interrupt program
*
*<Creep speed setting >
K76 K1200 K1DTOP H0
SM402
64
X4D
ON for 1
scan onl
y after
RUN
* Unit "Degree" setting program
* <For axis 1>
* Speed-position change control (ABS mode) execution and etc.
* (X4D turns ON before startup)
*
*<Basic parameters 1 setting compl >
SET M50
Paramete
r settin
g comple
te devic
*<Setting of movement amount per r >
K4 K9000000 K1DTOP H0
*<Setting of Unit setting >
K0 K2 K1TOP H0
*<Speed limit value >
K10 K20000000 K1DTOP H0
*<(S/W stroke limit upper limit) >
K18 K0 K1DTOP H0
*<(S/W stroke limit lower limit) >
K20 K0 K1DTOP H0
*<Current feed value of the speed >
K30 K1 K1TOP H0
*<Speed-position function selectio >
K34 K2 K1TOP H0
*<JOG speed limit value >
K48 K20000000 K1DTOP H0
*<OPR speed >
K74 K1000000 K1DTOP H0
*<Creep speed >
K76 K800000 K1DTOP H0
For Unit
(degree
)