



















5 - 38
Chapter 5 Data Used for Positioning Control
[Pr.24] Manual pulse generator/Incremental synchronous encoder input
selection
Set the manual pulse generator/incremental synchronous encoder input pulse
mode. (Only the value specified against the axis 1 is valid.)
0: A-phase/B-phase multiplied by 4
1: A-phase/B-phase multiplied by 2
2: A-phase/B-phase multiplied by 1
3: PLS/SIGN
Set the positive logic or negative logic in "[Pr.22] Input signal logic selection".
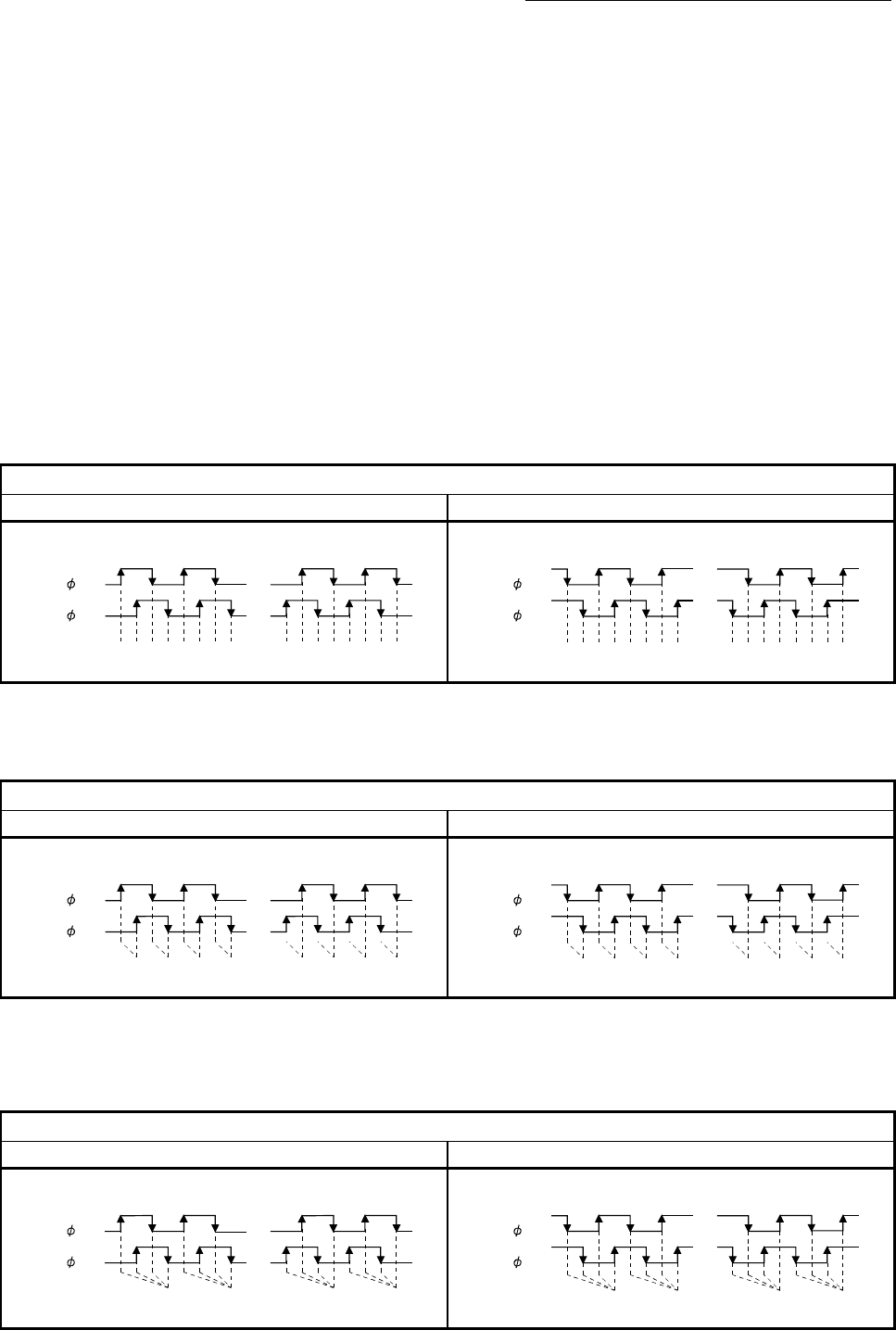
(1) A-phase/B-phase mode
• When the A-phase is 90° ahead of the B-phase, the motor will forward run.
• When the B-phase is 90° ahead of the A-phase, the motor will reverse run.
(a) A-phase/B-phase multiplied by 4
The positioning address increases or decreases at rising or falling edges
of A-phase/B-phase.
[Pr.22] Input signal logic selection
Positive logic Negative logic
+1
Reverse runForward run
A-phase
(A )
B-phase
(B )
+1+1+1+1+1+1+1 -1 -1 -1 -1 -1 -1 -1 -1
Positioning
address
+1
Reverse runForward run
A-phase
(A )
B-phase
(B )
+1+1+1+1+1+1+1 -1 -1 -1 -1 -1 -1 -1 -1
Positioning
address
(b) A-phase/B-phase multiplied by 2
The positioning address increases or decreases at twice rising or twice
falling edges of A-phase/B-phase.
[Pr.22] Input signal logic selection
Positive logic Negative logic
Reverse runForward run
A-phase
(A )
B-phase
(B )
+1 +1 +1 +1 -1 -1 -1 -1
Positioning
address
Reverse runForward run
A-phase
(A )
B-phase
(B )
+1 +1 +1 +1 -1 -1 -1 -1
Positioning
address
(c) A-phase/B-phase multiplied by 1
The positioning address increases or decreases at twice rising or twice
falling edges of A-phase/B-phase.
[Pr.22] Input signal logic selection
Positive logic Negative logic
-1+1+1 -1
Reverse runForward run
A-phase
(A )
B-phase
(B )
Positioning
address
-1+1+1 -1
Reverse runForward run
A-phase
(A )
B-phase
(B )
Positioning
address