



















13 - 8
Chapter 13 Control Sub Functions
13.2.2 OP shift function
When a machine OPR is carried out, the OP is normally established using the near-
point dog or zero signal. However, by using the OP shift function, the machine can be
moved a designated movement amount from the position where the zero signal was
detected. A mechanically established OP can then be interpreted at that point.
The details shown below explain about the "OP shift function".
[1] Control details
[2] Setting range for the OP shift amount
[3] Movement speed during OP shift
[4] Precautions during control
[5] Setting the OP shift function
[1] Control details
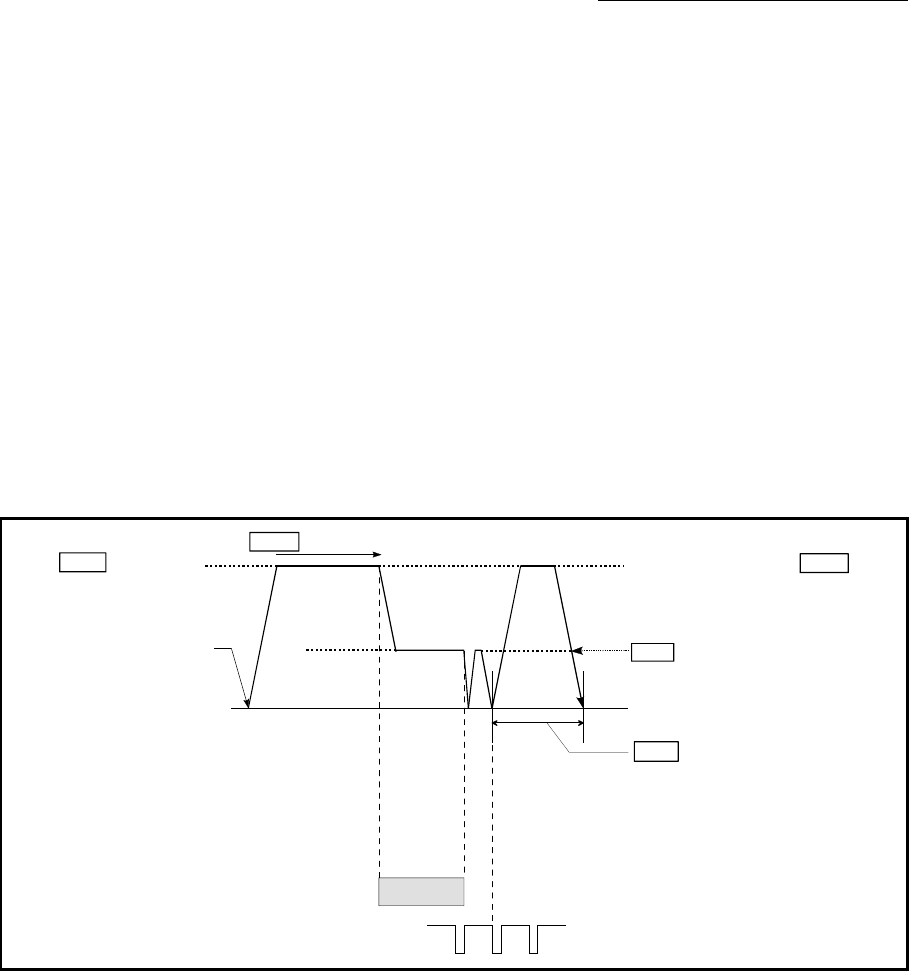
The following drawing shows the operation of the OP shift function.
Machine OPR start
Pr.53 OP shift amount
Speed selected by the" Pr. 56
Speed designation during
OP shift"
Pr.47 Creep speed
Pr. 44 OPR direction
Near-point dog
Pr. 46 OPR speed
Zero signal
Fig. 13.4 OP shift operation