



















6 - 74
Chapter 6 Sequence Program Used for Positioning Control
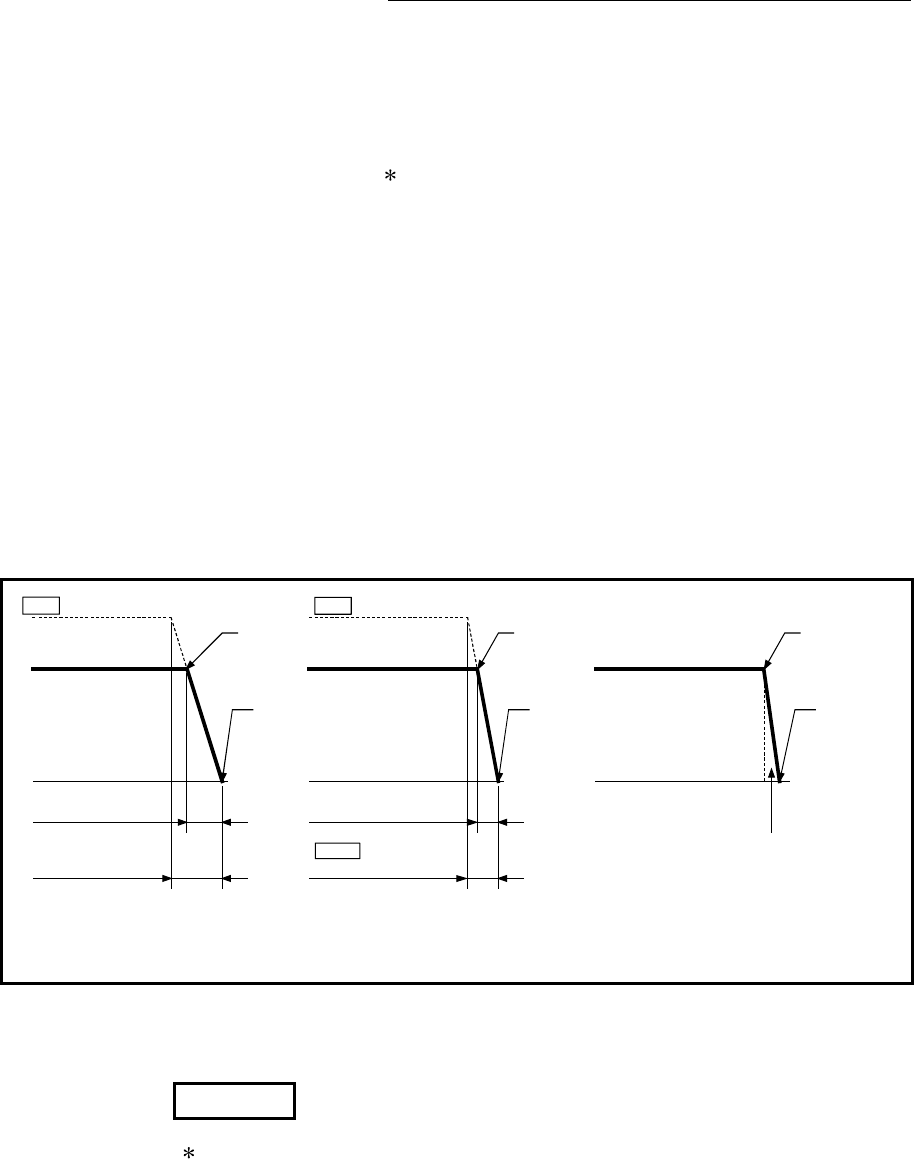
[2] Types of stop processes
The operation can be stopped with deceleration stop, sudden stop or immediate
stop.
(1) Deceleration stop
1
The operation stops with "deceleration time 0 to 3" ([Pr.10], [Pr.28], [Pr.29],
[Pr.30]).
Which time from "deceleration time 0 to 3" to use for control is set in positioning
data ([Da.40]).
(2) Sudden stop
The operation stops with "[Pr.36] Sudden stop deceleration time".
(3) Servo OFF or free run (The operation stops with dynamic brake or
electromagnetic brake.)
The operation does not decelerate.
The Simple Motion module immediately stops the command, but the operation
will coast for the droop pulses accumulated in the servo amplifier deviation
counter.
Actual deceleration time
Set deceleration time
Positioning speed
Actual sudden stop
deceleration time
Pr. 36 Sudden stop
deceleration time
Coast for the droop pulses accumulated
in the servo amplifier deviation counter.
Positioning speed Positioning speed
(2) Sudden stop
(1) Deceleration stop (3) Servo OFF or free run
(The operation stops with dynamic brake
or electromagnetic brake.)
Stop
Stop
cause
Pr. 8 Speed limit value
Pr. 8 Speed limit value
Sudden
stop cause
Stop Stop
Stop
cause
Fig. 6.15 Types of stop processes
REMARK
1 "Deceleration stop" and "sudden stop" are selected with the detailed parameter
2 "stop group 1 to 3 sudden stop selection". (The default setting is "deceleration
stop".