

















6 - 11
Chapter 6 Sequence Program Used for Positioning Control
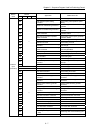
Device
name
Device
Application Details of storage
Axis 1 Axis 2 Axis 3 Axis 4
Data register
D52
—
Number of pulses per rotation
(low-order 16 bits)
[Pr.2] Number of pulses per rotation
(AP)
D53
Number of pulses per rotation
(high-order 16 bits)
D54
Movement amount per rotation
(low-order 16 bits)
[Pr.3] Movement amount per rotation
(AL)
D55
Movement amount per rotation
(high-order 16 bits)
D56 Bias speed at start (low-order 16 bits)
[Pr.7] Bias speed at start
D57 Bias speed at start (high-order 16 bits)
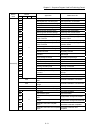
D68
Block start data (Block 0)
Point 1 (shape, start No.)
[Da.11] Shape
[Da.12] Start data No.
[Da.13] Special start instruction
[Da.14] Parameter
D69 Point 2 (shape, start No.)
D70 Point 3 (shape, start No.)
D71 Point 4 (shape, start No.)
D72 Point 5 (shape, start No.)
D73 Point 1 (special start instruction)
D74 Point 2 (special start instruction)
D75 Point 3 (special start instruction)
D76 Point 4 (special start instruction)
D77 Point 5 (special start instruction)
D78 Torque change value —
D79 Error code [Md.23] Axis error No.
D80 Servo series [Pr.100] Servo series
D81 Absolute position system valid/invalid
Absolute position detection system
(PA03)
D85 Return home position method [Pr.43] OPR method
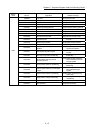
D100 Positioning identifier
Data No.1
[Da.1] Operation pattern
[Da.2] Control system
[Da.3] Acceleration time No.
[Da.4] Deceleration time No.
[Da.5] Axis to be interpolated
[Da.6] Positioning address/
movement amount
[Da.7] Arc address
[Da.8] Command speed
[Da.9] Dwell time/JUMP destination
positioning data No.
[Da.10] M code/Condition data
No./Number of LOOP to
LEND repetitions
D101 M code
D102 Dwell time
D103 Dummy
D104 Command speed (low-order 16 bits)
D105 Command speed (high-order 16 bits)
D106 Positioning address (low-order 16 bits)
D107 Positioning address (high-order 16 bits)
D108
Arc address
(low-order 16 bits)
D109
Arc address
(high-order 16 bits)