



















1 - 19
Chapter 1 Product Outline
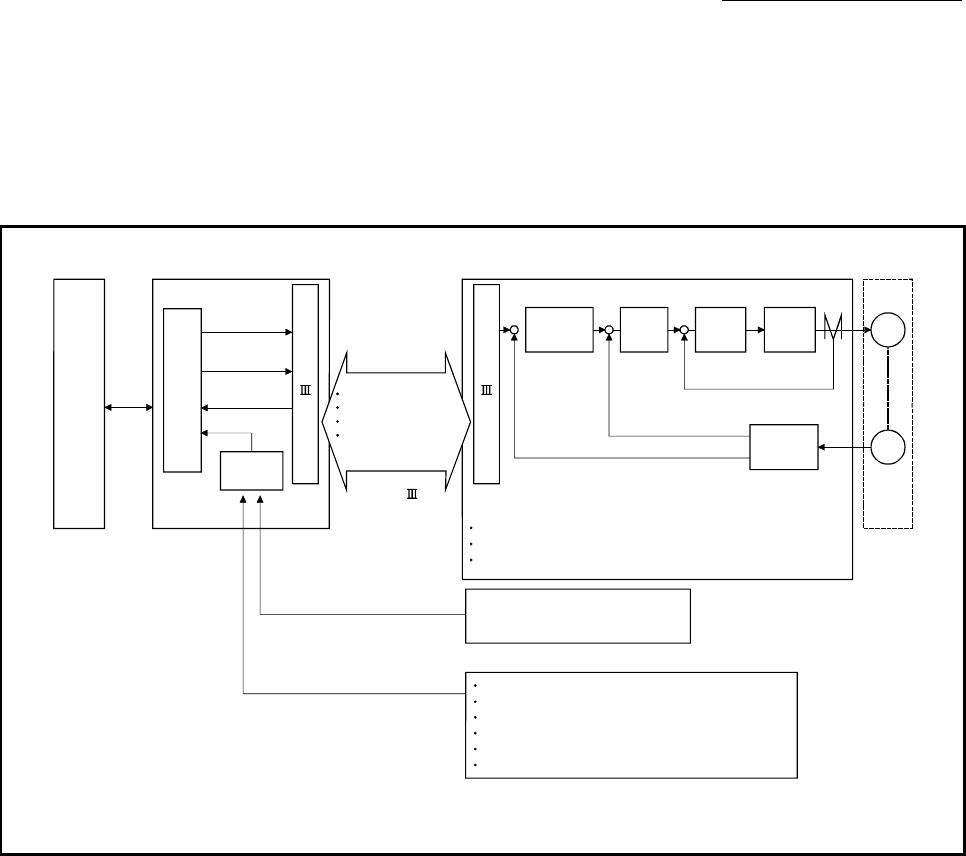
1.1.5 Outline design of positioning system
The outline of the positioning system operation and design using the Simple Motion
module is shown below.
(1) Positioning system using Simple Motion module
Read
and
write,
etc.
S
S
C
N
E
T
I
/
F
/
H
(
(
External input signal of servo amplifier (Refer to the servo
amplifier Instruction manual.)
FLS (Upper limit signal)
(Note)
RLS (Lower limit signal)
(Note)
DOG (Near-point dog signal)
(Note)
External input signal (Refer to Section 3.4.2)
Manual pulse generator/
Incremental synchronous encoder
A-phase/B-phase
EMI (Forced stop input signal)
FLS (Upper limit signal)
(Note)
RLS (Lower limit signal)
(Note)
DI (External command signal/Switching signal)
STOP (STOP signal)
DOG (Near-point dog signal)
(Note)
SSCNET (/H)
Positioning command
Control command
Monitor data
External input signal
of the servo amplifier
PLC
CPU Simple Motion module
OS
Monitor data
Interface
Positioning
command
Control
command
(Note): The external input signal of QD77MS, external input signal of servo amplifier,
or external input signal via CPU (buffer memory of QD77MS) can be used in
the parameter setting. (Refer to Section 5.2.3.)
Servo
motorServo amplifier
Interface
M
PLG
Positioning
control
Speed
control
Current
control
Inverter
Current feedback
Speed feedback
Position feedback
+
-
+
-
+
-
S
S
C
N
E
T
I
/
F
/
H
(
(
Fig. 1.1 Outline of the operation of positioning system using Simple Motion module