

















3 - 14
Chapter 3 Specifications and Functions
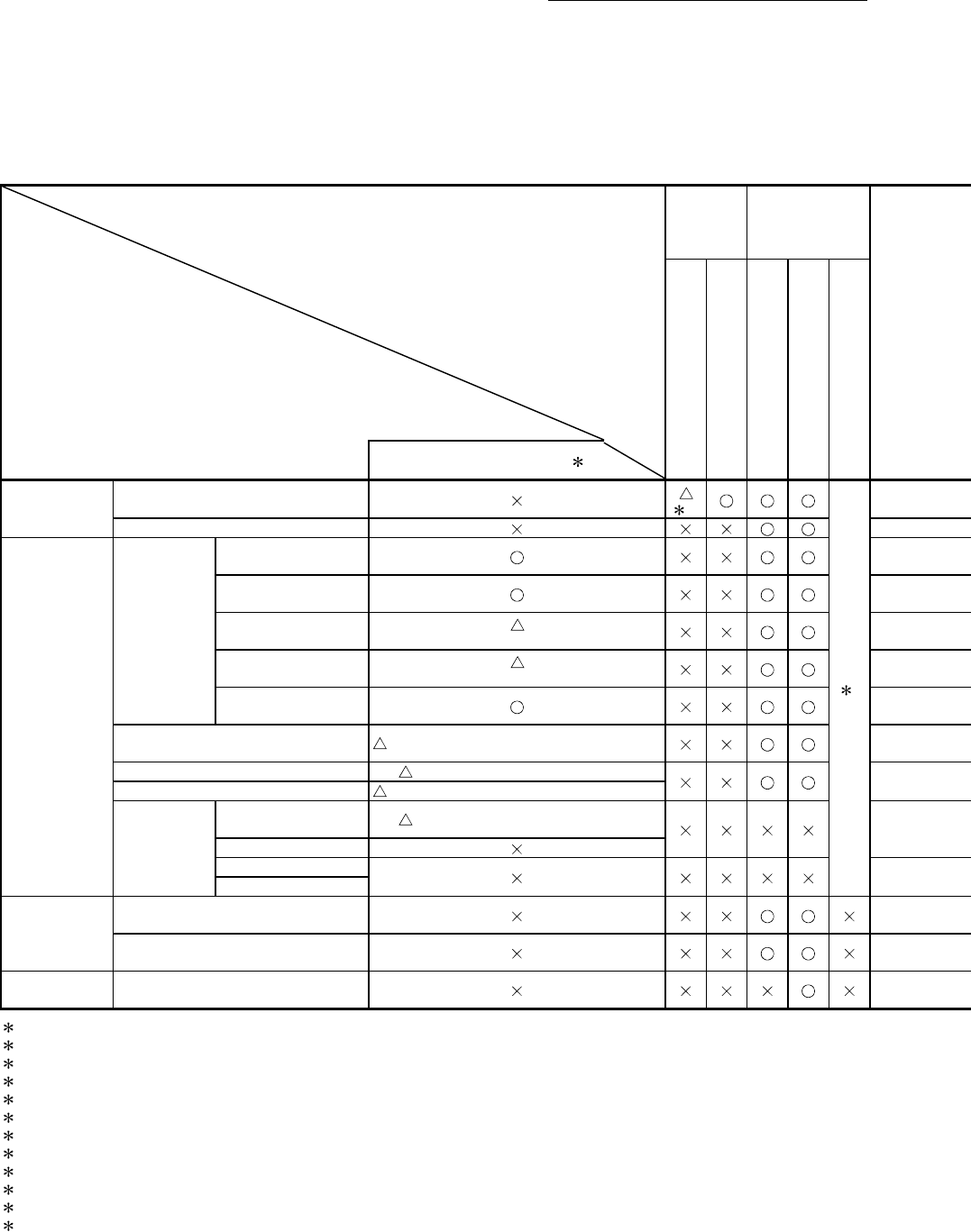
3.2.5 Combination of QD77MS main functions and sub functions
With positioning control using the Simple Motion module, the main functions and sub
functions can be combined and used as necessary. A list of the main function and sub
function combinations is given below.
Sub functions
Main functions
Functions
characteristic
to machine
OPR
Functions that
compensate control
OPR retry function
OP shift function
Backlash compensation function
Electronic gear function
Near pass function
Combination with operation pattern.
1
OPR control
Machine OPR control
11
2
Fast OPR control
Major positioning
control
Position control
1-axis linear control
2-, 3-, or 4-axis linear
interpolation control
1-axis fixed-feed control
(Continuous path control cannot be set)
2-, 3-, or 4-axis fixed-feed
control (interpolation)
(Continuous path control cannot be set)
2-axis circular interpolation
control
Speed control (1- to 4-axis)
(Only independent positioning control can be set)
Speed-position switching control
(Continuous path control cannot be set)
Position-speed switching control
(Only independent positioning control can be set)
Other control
Current value changing
(Continuous path control cannot be set)
NOP instruction
JUMP instruction
LOOP to LEND
Manual control
JOG operation, inching operation
Manual pulse generator operation
Expansion control Speed-torque control
1: The operation pattern is one of the "positioning data" setting items.
2: The near pass function is featured as standard and is valid only for setting continuous path control for position control.
3: Invalid during creep speed.
4: Invalid during continuous path control.
5: Combination with the inching operation is not available. (Inching operation does not perform acceleration/deceleration processing.)
6: Valid for the reference axis only.
7: Valid for only the case where a deceleration start is made during position control.
8: Change the current value using the positioning data. Disabled for a start of positioning start No. 9003.
9: Valid for "[Md.22] Feedrate" and "[Md.28] Axis feedrate".
10: Valid for a start of positioning start No.9003, but invalid for a start of positioning data (No. 1 to 600).
11: OPR retry function cannot be used during the scale origin signal detection method machine OPR.
12: Refer to Section 12.1 "Speed-torque control" for acceleration/deceleration processing in the speed-torque control.