13 - 37
Chapter 13 Control Sub Functions
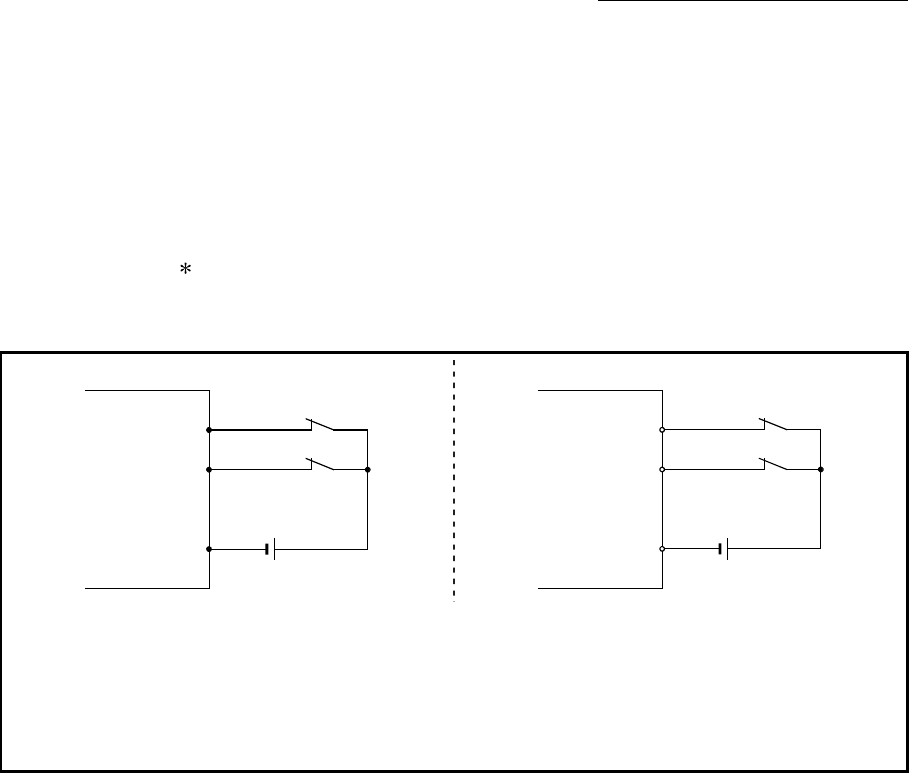
[2] Wiring the hardware stroke limit
When using the hardware stroke limit function, wire the terminals of the
QD77MS/servo amplifier upper/lower limit stroke limit as shown in the following
drawing. As for the 24VDC power supply, the direction of current can be switched.
(When "[Pr.22] Input signal logic selection" is set to the initial value)
When using the hardware stroke limit function with the external input signal via
CPU (buffer memory of QD77MS), wiring differs depending on the input module.
: When "external input signal of the servo amplifier" is set in "[Pr.80] External input signal selection"
at MR-JE-B use, any errors or warnings do not occur. However, the external input signal
(upper/lower limit signal, near-point dog signal) cannot be operated.
QD77MS
FLS
COM
24VDC
RLS
Servo amplifier
DI1
(FLS)
DICOM
24VDC
DI2
(RLS)
(Note): Wire the limit switch installed in the direction to which "Current feed value" increases as upper
limit switch and the limit switch installed in the limit switch installed in the direction to which
"Current feed value" decreases as lower limit switch. If inverting the install positions of
upper/lower limit switches, hardware stroke limit function cannot be operated properly. In
addition, the servomotor does not stop. Refer to each servo amplifier instruction manual for
details about the "Rotation direction selection/travel direction selection (PA14)".
Fig. 13.18 Wiring when using the hardware stroke limit
[3] Precautions during control
(1) If the machine is stopped outside the Simple Motion module control range
(outside the upper/lower limit switches), or if stopped by hardware stroke
limit detection, the starting for the "OPR control", "major positioning control",
and "high-level positioning control" and the control mode switching cannot
be executed. To carry out these types of control again, return the workpiece
to the Simple Motion module control range by a "JOG operation", "inching
operation" or "manual pulse generator operation".
(2) When "[Pr.22] Input signal logic selection" is set to the initial value, the
Simple Motion module cannot carry out the positioning control if FLS (limit
switch for upper limit) is separated from DICOM or RLS (limit switch for
lower limit) is separated from DICOM (including when wiring is not carried
out).















































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































