



















9 - 15
Chapter 9 Major Positioning Control
9.1.3 Designating the positioning address
The following shows the two methods for commanding the position in control using
positioning data.
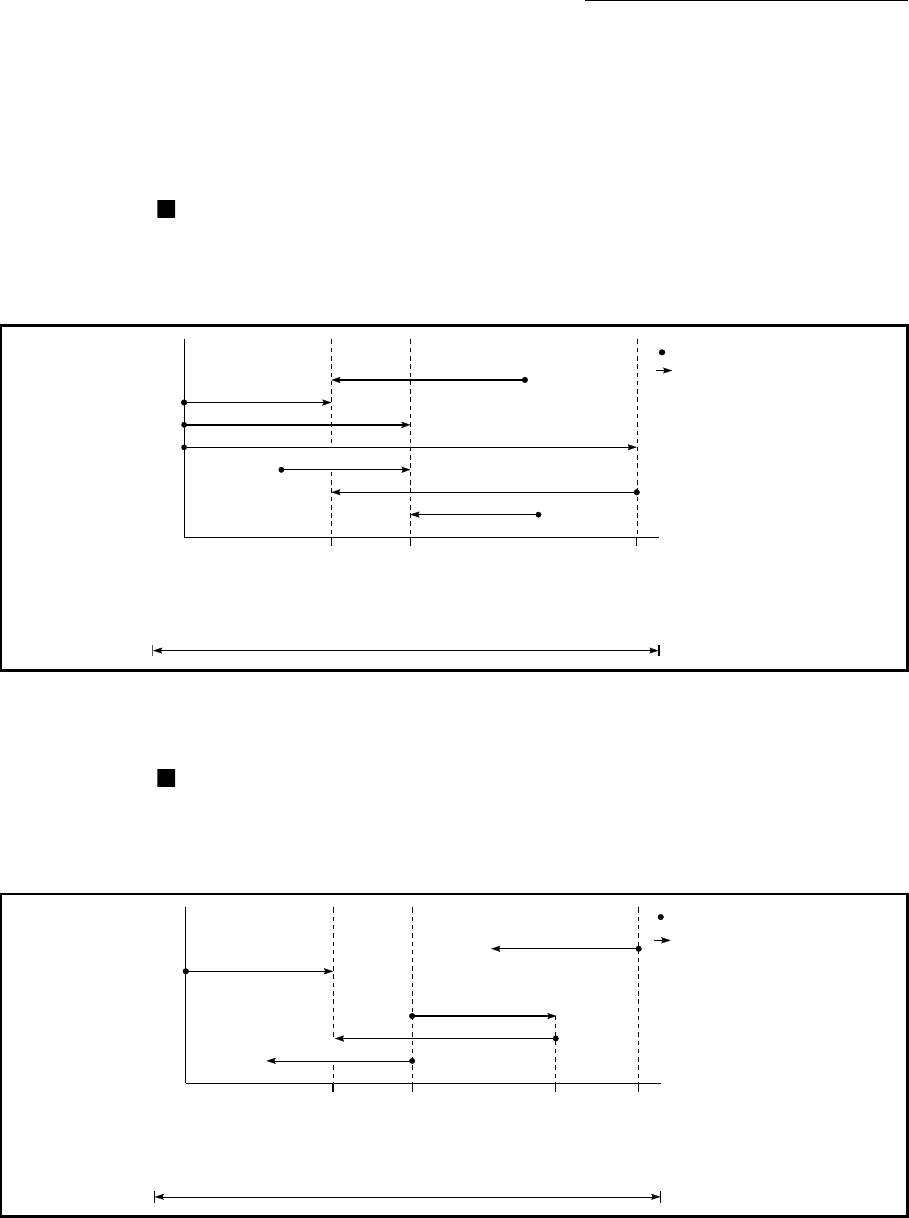
Absolute system
Positioning is carried out to a designated position (absolute address) having the
OP as a reference. This address is regarded as the positioning address. (The start
point can be anywhere.)
Address
100
Address
150
Address
300
100
A point
150
B point
300
C point
Within the stroke limit range
Address 150
Address
100
Address 100
Address 150
Start point
End point
OP
(Reference point)
Fig. 9.6 Absolute system positioning
Incremental system
The position where the machine is currently stopped is regarded as the start point,
and positioning is carried out for a designated movement amount in a designated
movement direction.
Movement amount
+100
Movement
amount -150
Movement amount
-100
100 150 300
Movement amount-100
A point B point
Within the stroke limit range
C point
Movement amount
+100
Start point
End point
250
OP
(Reference point)
Fig. 9.7 Incremental system positioning