



















13 - 66
Chapter 13 Control Sub Functions
[2] OPR
The absolute position system can establish the OP position, using "Data set
method", "Near-point dog method", "Count method" and "Scale origin signal
detection method" OPR method.
In the "Data set method" OPR method, the location to which the location of the
OP position is moved by manual operation (JOG operation/manual pulse
generator operation) is treated as the OP position.
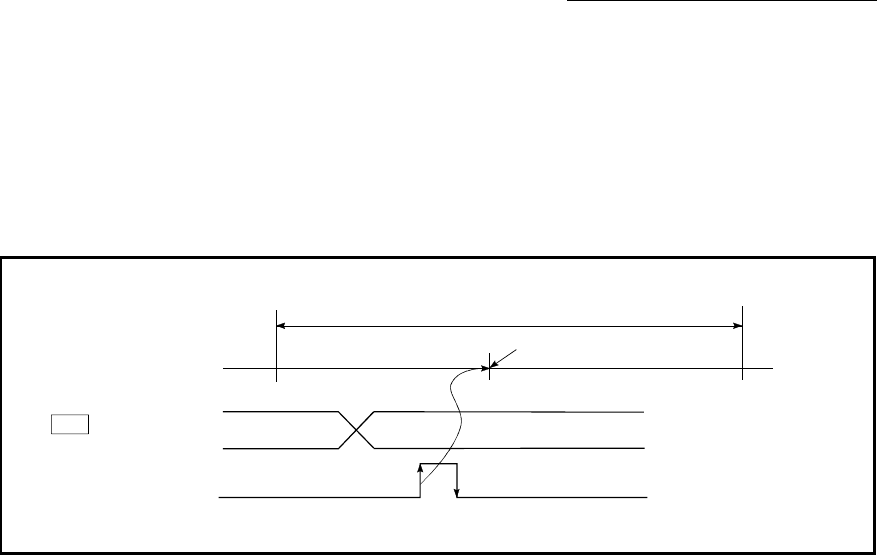
[QD77MS4 operation example]
The stop position during
OPR execution is stored as the OPR position.
9001 (OPR destination)
Cd.3 Positioning
start No.
Positioning start
[Y10 to Y13]
Movement range for the machine
Moved to this position by
manual operation.
(Note): Refer to Section 3.3 for input/output signal of QD77MS16.
Fig. 13.36 Operation of the OPR execution