



















5 - 41
Chapter 5 Data Used for Positioning Control
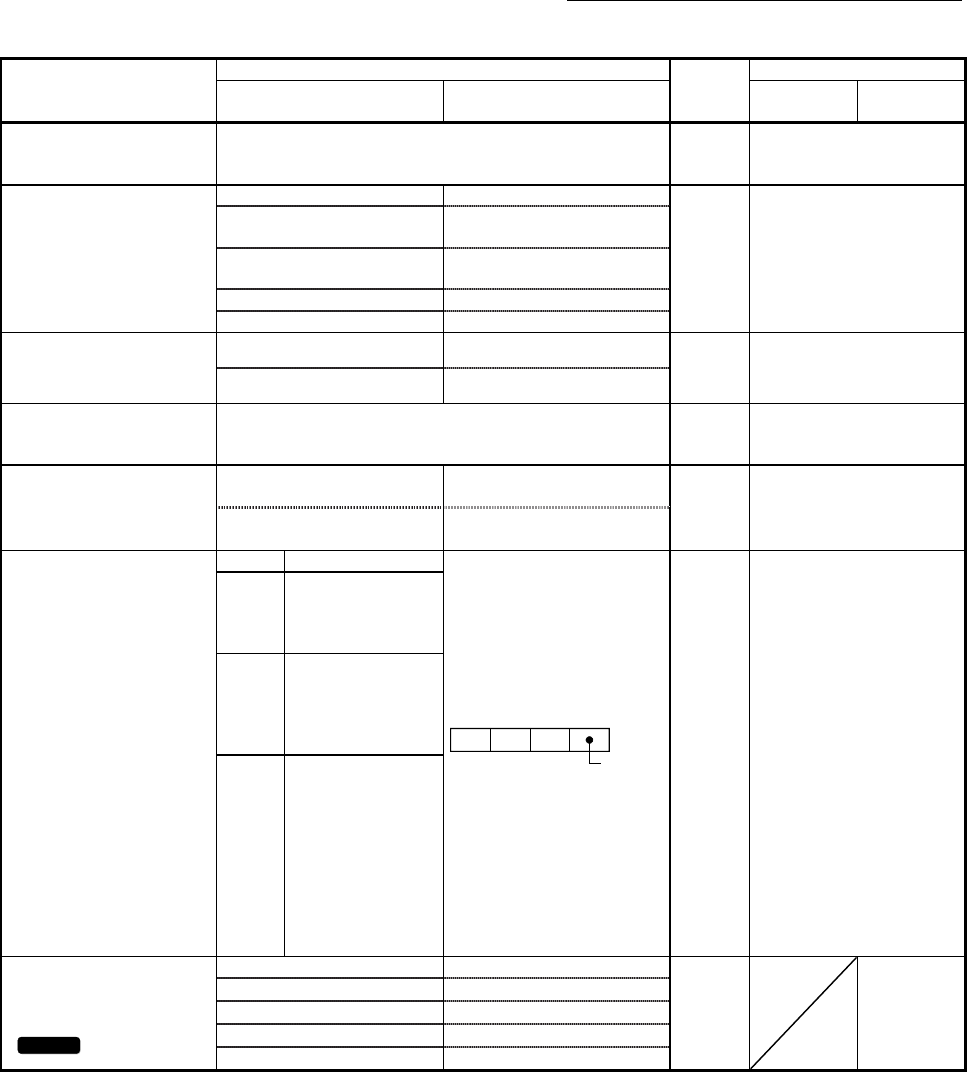
Item
Setting value, setting range
Default
value
Buffer memory address
Value set with GX Works2
Value set with sequence
program
QD77MS2
QD77MS4
QD77MS16
[Pr.41]
Allowable circular
interpolation error width
The setting value range differs depending on the "[Pr.1] Unit
setting".
100
60+150n
61+150n
[Pr.42]
External command function
selection
0: External positioning start 0
0 62+150n
1: External speed change
request
1
2: Speed-position, position-
speed switching request
2
3: Skip request 3
4: High speed input request 4
[Pr.83]
Speed control 10 x multiplier
setting for degree axis
0: Invalid 0
0 63+150n
1: Valid 1
[Pr.84]
Restart allowable range
when servo OFF to ON
0, 1 to 327680 [PLS]
0: restart not allowed
0
64+150n
65+150n
[Pr.89]
Manual pulse generator/
Incremental synchronous
encoder input type selection
0: Differential output type 0
1 67
1: Voltage output/open collector
type
1
[Pr.90]
Operation setting for speed-
torque control mode
b0 to b3 Not used
b15 to b12b11 to b8 b7 to b4 b3 to b0
Always "0" is
set to the part
not used.
0000H 68+150n
b4 to b7
Torque initial value
selection
0: Command torque
1: Feedback torque
b8 to
b11
Speed initial value
selection
0: Command speed
1: Feedback speed
2: Automatic selection
b12 to
b15
Condition selection at
mode switching
0: Switching
conditions valid (for
switching control
mode)
1: Zero speed ON
condition invalid
(for switching
control mode)
[Pr.95]
External command signal
selection
QD77MS16
0: Not used 0
0
69+150n
1: DI1 1
2: DI2 2
3: DI3 3
4: DI4 4
n: Axis No.-1
[Pr.25] Acceleration time 1 to [Pr.27] Acceleration time 3
These parameters set the time for the speed to increase from zero to the "[Pr.8]
Speed limit value" ("[Pr.31] JOG speed limit value" at JOG operation control)
during a positioning operation.