



















6 - 45
Chapter 6 Sequence Program Used for Positioning Control
Speed ch
ange val
ue
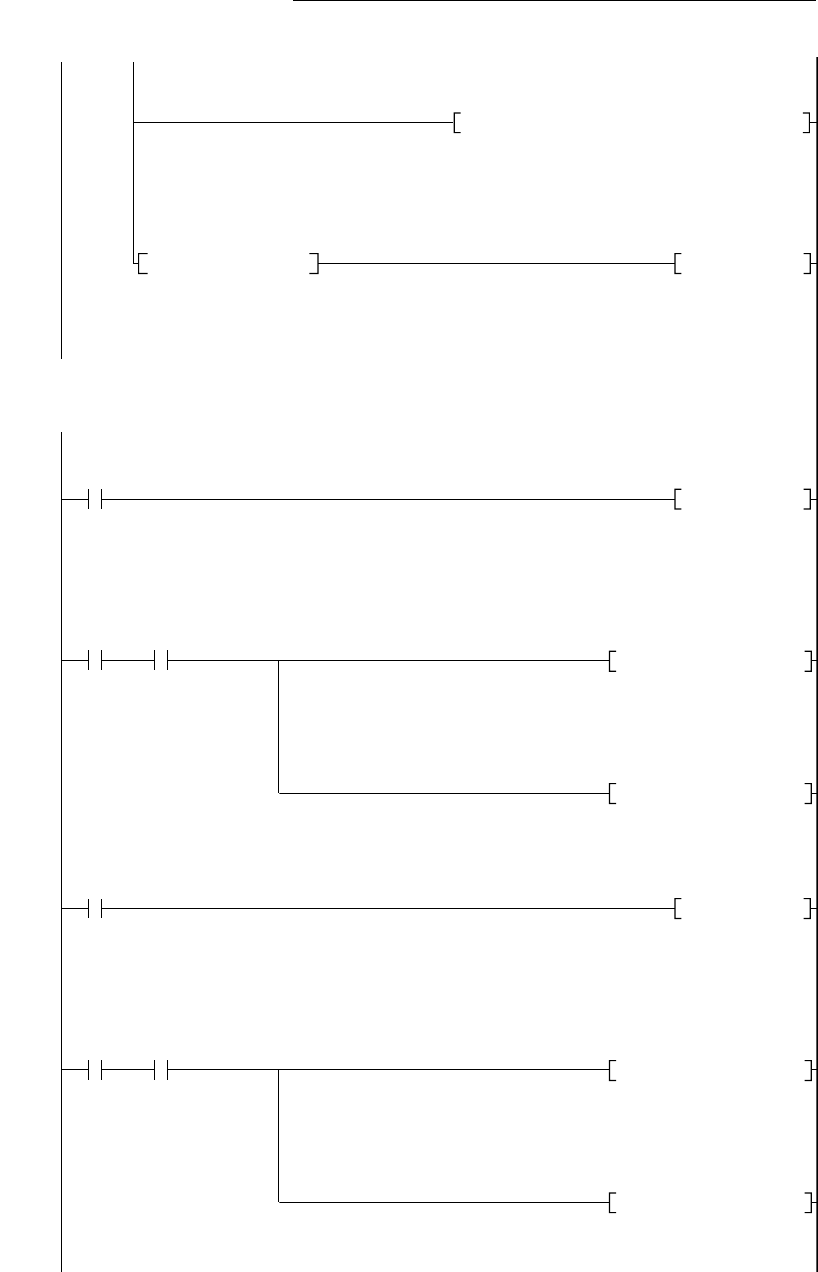
*<Speed changing write >
1120
X33
M13
1127
X0C
BUSY sig
nal (Axi
s 1)
MOV K200
*<Override command >
PLS M13
Override
command
*<Setting of override value to 200% >
*<Override value write >
MOV D14
U0\
G1513
Override
*
* No.17 Override program
*
Speed ch
ange com
mand sto
rage
*<Speed change request storage OFF >
RST M12
D11 K3TOP H0 K1514
Speed ch
ange req
uest
=K0
U0\
G1516
Override
command
Override
command
Override
value
D14
1137
X48
M40
1141
X0C
BUSY sig
nal (Axi
s 1)
MOV K100
*<Override command >
PLS M40
Override
initial
ization
value co
*<Setting of override value to 100% >
*<Override value write >
MOV D14
U0\
G1513
Override
Override
initial
ization
value co
Override
value
D14
Override
initial
ization
value co
Override
value
Override
value