



















5 - 39
Chapter 5 Data Used for Positioning Control
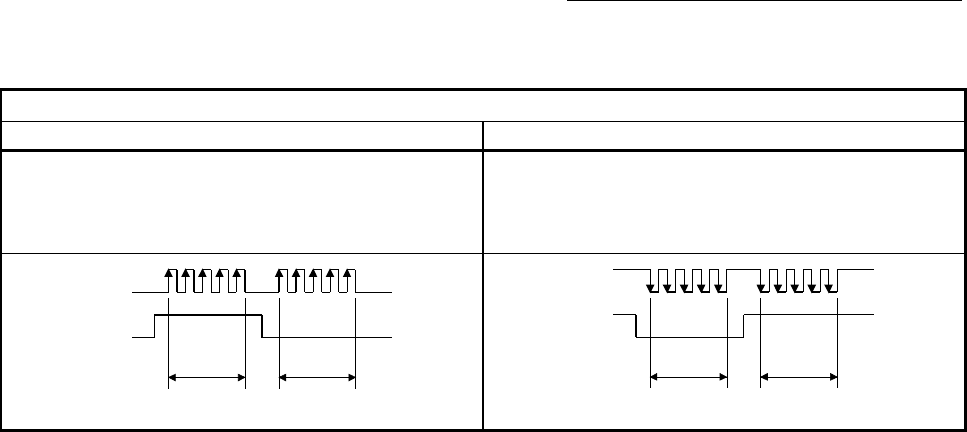
(2) PLS/SIGN
[Pr.22] Input signal logic selection
Positive logic Negative logic
Forward run and reverse run are controlled with the ON/OFF
of the direction sign (SIGN).
• The motor will forward run when the direction sign is HIGH.
• The motor will reverse run when the direction sign is LOW.
Forward run and reverse run are controlled with the ON/OFF
of the direction sign (SIGN).
• The motor will forward run when the direction sign is LOW.
• The motor will reverse run when the direction sign is HIGH.
PLS
SIGN
Reverse
run
Move in +
direction
Move in -
direction
Forward
run
PLS
SIGN
Reverse
run
Move in +
direction
Move in -
direction
Forward
run
[Pr.81] Speed-position function selection
Select the mode of speed-position switching control.
0: INC mode
2: ABS mode
Note1: If the setting is other than 0 and 2, operation is performed in the INC mode
with the setting regarded as 0.
[Pr.82] Forced stop valid/invalid selection
Set the forced stop valid/invalid. (Only the value specified against the axis 1 is
valid.)
All axes of the servo amplifier are made to batch forced stop when the forced stop
input signal is turned on.
The error "Servo READY signal OFF during operation" (error code: 102) does not
occur if the forced input signal is turned on during operation.
0: Valid (Forced stop is used)
1: Invalid (Forced stop is not used)
Note1: If the setting is other than 0 and 1, the error "Forced stop valid/invalid
setting error" (error code: 937) occurs.
Note2: The "[Md.50] Forced stop input" is stored "1" by setting "Forced stop
valid/invalid selection" to invalid.