



















5 - 60
Chapter 5 Data Used for Positioning Control
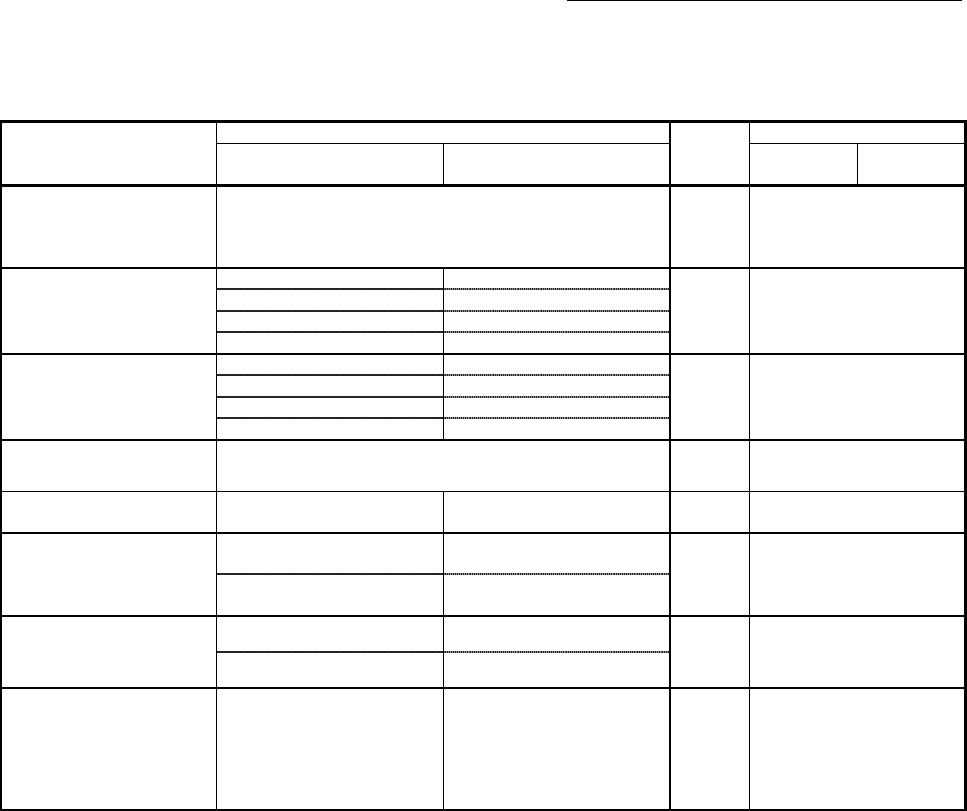
5.2.6 OPR detailed parameters
Item
Setting value, setting range
Default
value
Buffer memory address
Value set with GX Works2
Value set with sequence
program
QD77MS2
QD77MS4
QD77MS16
[Pr.50]
Setting for the movement
amount after near-point dog
ON
The setting value range differs depending on the "[Pr.1] Unit
setting".
0
80+150n
81+150n
[Pr.51]
OPR acceleration time
selection
0 : [Pr.9] Acceleration time 0 0
0 82+150n
1 : [Pr.25] Acceleration time 1 1
2 : [Pr.26] Acceleration time 2 2
3 : [Pr.27] Acceleration time 3 3
[Pr.52]
OPR deceleration time
selection
0 : [Pr.10] Deceleration time 0 0
0 83+150n
1 : [Pr.28] Deceleration time 1 1
2 : [Pr.29] Deceleration time 2 2
3 : [Pr.30] Deceleration time 3 3
[Pr.53]
OP shift amount
The setting value range differs depending on the "[Pr.1] Unit
setting".
0
84+150n
85+150n
[Pr.54]
OPR torque limit value
1 to 1000 (%) 1 to 1000 (%) 300 86+150n
[Pr.55]
Operation setting for
incompletion of OPR
0 : Positioning control is not
executed.
0
0 87+150n
1 : Positioning control is
executed.
1
[Pr.56]
Speed designation during
OP shift
0 : OPR speed 0
0 88+150n
1 : Creep speed 1
[Pr.57]
Dwell time during OPR retry
0 to 65535 (ms)
0 to 65535 (ms)
0 to 32767 : Set as a
decimal
32768 to 65535 : Convert into
hexadecimal
and set
0 89+150n
n: Axis No.-1