



















5 - 189
Chapter 5 Data Used for Positioning Control
Setting value
Default
value
Buffer memory address
QD77MS2
QD77MS4
QD77MS16
Set with a decimal.
K
Reverse new torque value
0 to Pr.17 Torque limit setting value (%)
Setting
value
0 1564+100n 4364+100n
Set with a decimal.
Set "1" for MR-J4(W)-B/MR-JE-B/MR-J3(W)-B, and set "2" for VCII series.
Writing failure occurs when a value except "1" or "2" is set.
Setting
value
K
Parameter write request
1 : 1 word write request
2 : 2 words write request
Other than 1 and 2: Not request
The Simple Motion module resets the value to "0" automatically
when the parameter write access completes.
(The Simple Motion module resets the value to "3" at writing failure.)
0 1554+100n 4354+100n
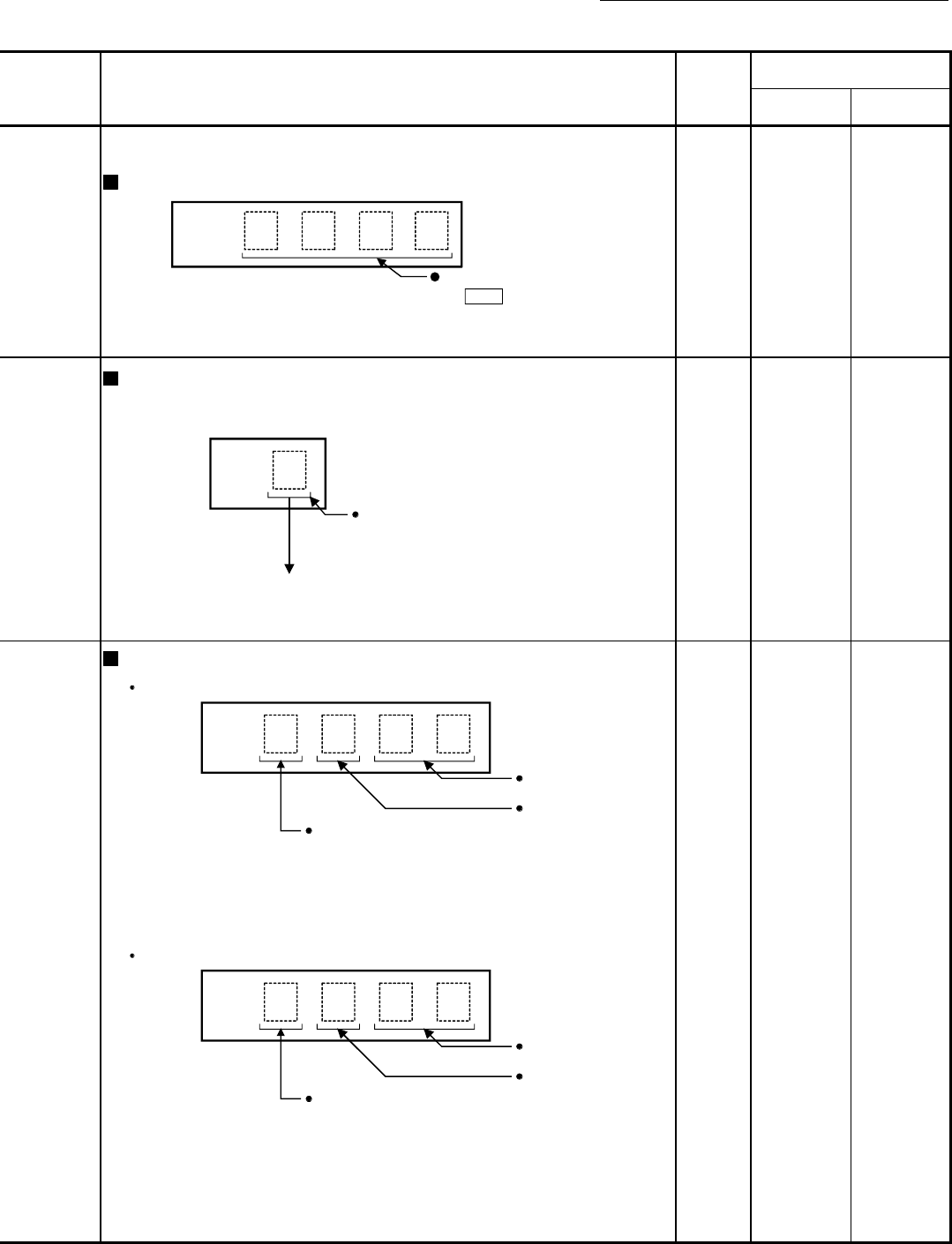
Set with a hexadecimal.
Writing mode
0: Write to RAM
Setting
value
H
Parameter No. setting
01h to 40h
0
Parameter group
0: PA group
1: PB group
2: PC group
3: PD group
4: PE group
5: PF group
9: Po group
A: PS group
B: PL group
MR-J4(W)-B/MR-JE-B
Writing mode
0: Write to RAM
Setting
value
H
Parameter No. setting
01h to 99h
0
Parameter group
0: Group 0
1: Group 1
2: Group 2
3: Group 3
4: Group 4
5: Group 5
6: Group 6
7: Group 7
8: Group 8
9: Group 9
VCII series
0000H 1555+100n 4355+100n