



















6 - 49
Chapter 6 Sequence Program Used for Positioning Control
*
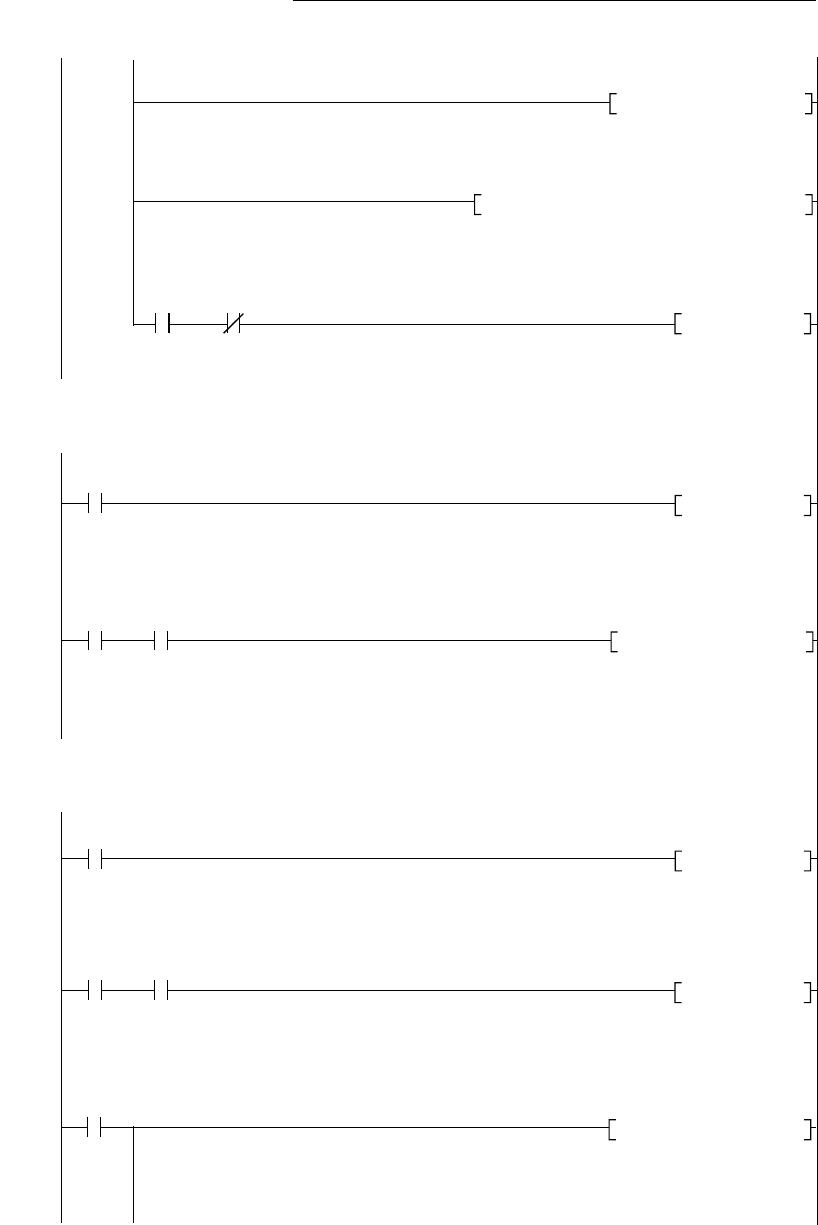
* No.21 Continuous operation interrupt program
*
1299
X3A
*<Continuous operation interrupt c >
Continuo
us opera
tion int
errupt c
PLS M21
*<Setting of positioning data No. >
K3 K1
*<Teaching execution >
"U0" D33 M34ZP.TEACH1
*<Teaching command storage OFF >
RST
M20
Teaching
command
storage
Continuo
us opera
tion int
errupt c
M21
1306
X0C
BUSY sig
nal (Axi
s 1)
*<Continuous operation interrupt w >
Continuo
us opera
tion int
errupt c
MOVP K1
U0\
G1520
Continuo
us opera
tion int
errupt r
*
* No. 23 Continuous operation interrupt program
*
*
* No.21 Continuous operation interrupt program
*
*
* No. 24 Target position change program
*
1313
X45
*<Target position change command p >
Target p
osition
change c
ommand
PLS M30
Target p
osition
change c
ommand p
M30
1320
X0C
BUSY sig
nal (Axi
s 1)
*<Target position change command h >
SET
M31
Target p
osition
change c
omm
Target p
osition
change c
ommand p
1324
M31
*<Setting of Target position addre >
Target p
osition
change c
omm
DMOVP K-120000 D23
target p
osition
(low-ord
er 16 bi
MOVP K7
D36
Position
ing data
No.
M34
TEACH1 i
nstructi
on compl
ete devi
M35
TEACH1 i
nstructi
on error
complet
TEACH1 i
nstructi
on contr
ol data
TEACH1 i
nstructi
on compl
ete devi