



















APPENDIX
App. - 43
(2) Setting
POINT
When you use a linear servo motor, replace the following left words to the right
words.
(servo motor) speed
→
(linear servo motor) speed
CCW direction
→
Positive direction
CW direction
→
Negaative direction
Torque
→
Thrust
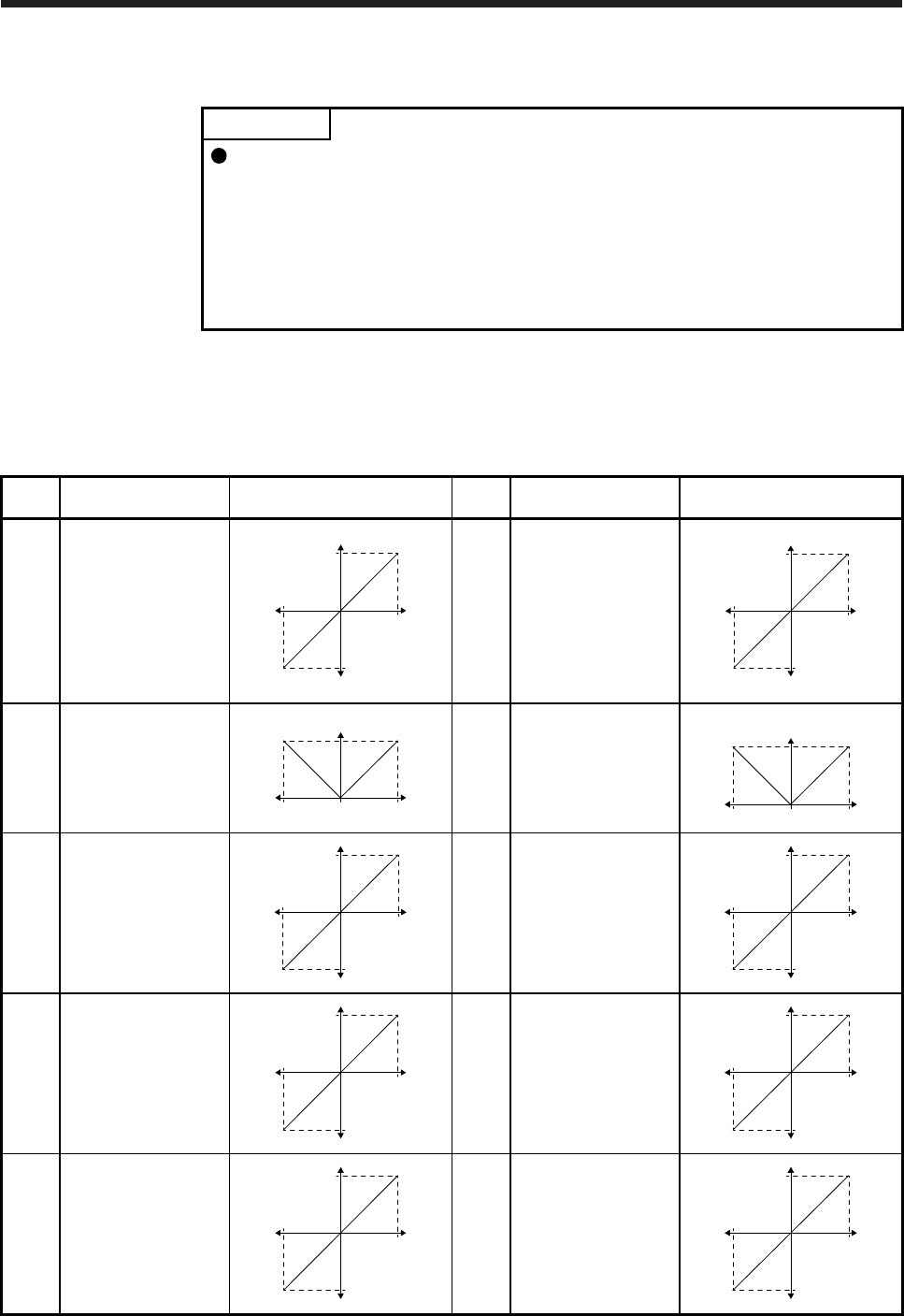
The servo amplifier is factory-set to output the servo motor speed to MO1 (Analog monitor 1) and the
torque to MO2 (Analog monitor 2). The setting can be changed as listed below by setting the [Pr. PC09]
and [Pr. PC10] value.
Refer to (3) for the detection point.
Setting
value
Output item Description
Setting
value
Output item Description
00 Servo motor speed/
Linear servo motor
speed
Maximum speed
CW direction
CCW direction
Maximum speed
0
8 [V]
-8 [V]
01 Torque/Thrust
Maximum torque
Power running in
CW direction
Power running in
CCW direction
Maximum torque
0
8 [V]
-8 [V]
02 Servo motor speed/
Linear servo motor
speed
Maximum speed
CW direction CCW direction
Maximum speed 0
8 [V]
03 Torque/Thrust
Maximum torque
Power running in
CW direction
Power running in
CCW direction
Maximum torque 0
8 [V]
04 Current command
Maximum current command
(Maximum torque command)
CW direction
CCW direction
Maximum current command
(Maximum torque command)
0
8 [V]
-8 [V]
05 Speed command
Maximum speed
CW direction
CCW direction
Maximum speed
0
8 [V]
-8 [V]
06 Servo motor-side droop
pulses
(Note 1, 3, 5, 6)
(±10 V/100 pulses)
100 [pulse]
CW direction
CCW direction
100 [pulse]
0
10 [V]
-10 [V]
07 Servo motor-side droop
pulses
(Note 1, 3, 5, 6)
(±10 V/1000 pulses)
1000 [pulse]
CW direction
CCW direction
1000 [pulse]
0
10 [V]
-10 [V]
08 Servo motor-side droop
pulses
(Note 1, 3, 5, 6)
(±10 V/10000 pulses)
10000 [pulse]
CW direction
CCW direction
10000 [pulse]
0
10 [V]
-10 [V]
09 Servo motor-side droop
pulses
(Note 1, 3, 5, 6)
(±10 V/100000 pulses)
100000 [pulse]
CW direction
CCW direction
100000 [pulse]
0
10 [V]
-10 [V]