


















16. FULLY CLOSED LOOP SYSTEM
16 - 4
16.1.3 System configuration
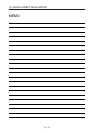
(1) For a linear encoder
(a) MR-J4-_B_ servo amplifier
CN2
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
Table
To the next servo amplifier
(Note)
Two-wire type serial interface compatible linear encoder
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
Note.
A
pplicable for the absolute position detection system when an absolute position linear encoder is used.
In that case, a battery is not required.
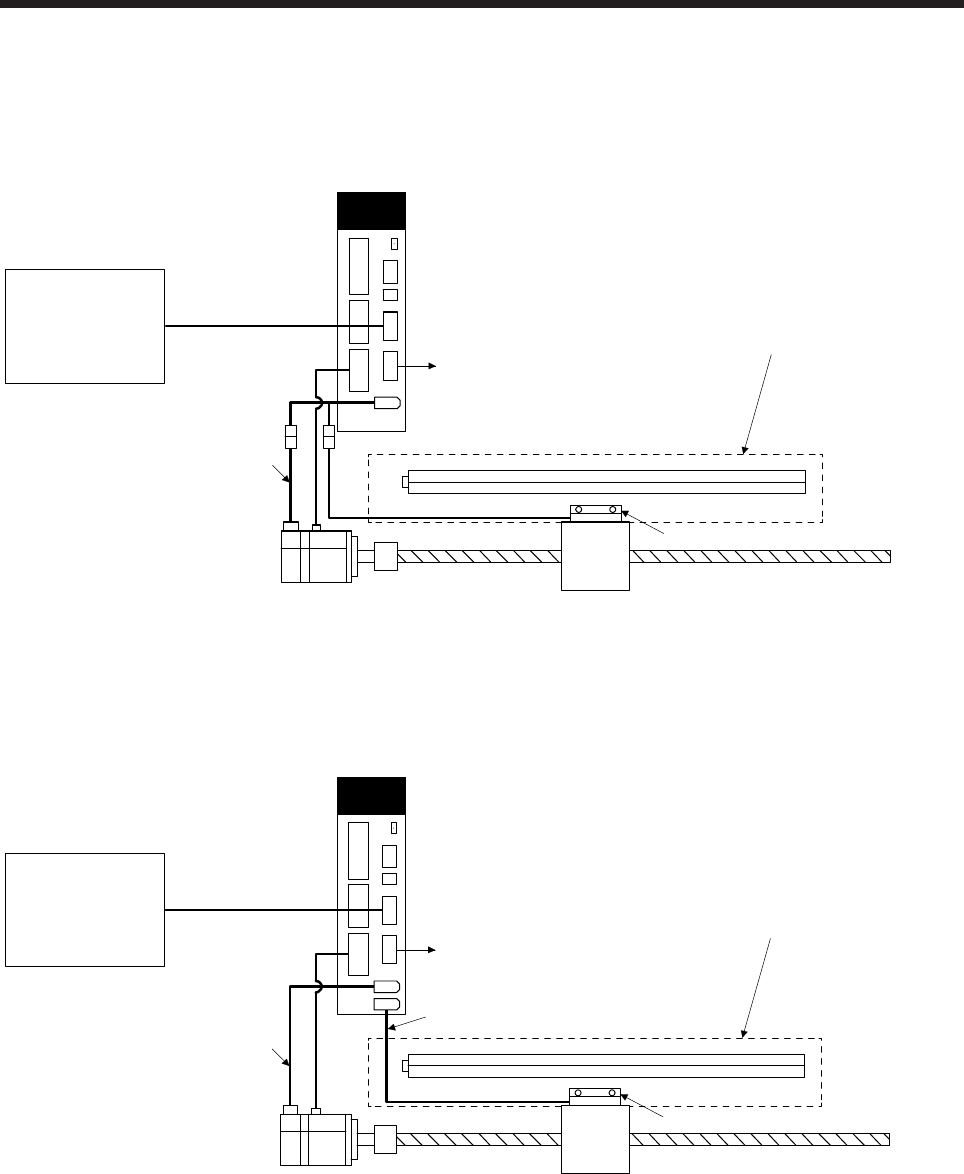
(b) MR-J4-_B_-RJ servo amplifier
CN2
(Note)
A/B/Z-phase pulse train interface compatible linear encoder
or
two-wire/four-wire type serial interface compatible linear encoder
CN2L
(A/B/Z-phase pulse train interface
or serial interface)
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
Table
To the next servo amplifier
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
Note.
A
pplicable for the absolute position detection system when an absolute position linear encoder is used.
In that case, a battery is not required.