



















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 96
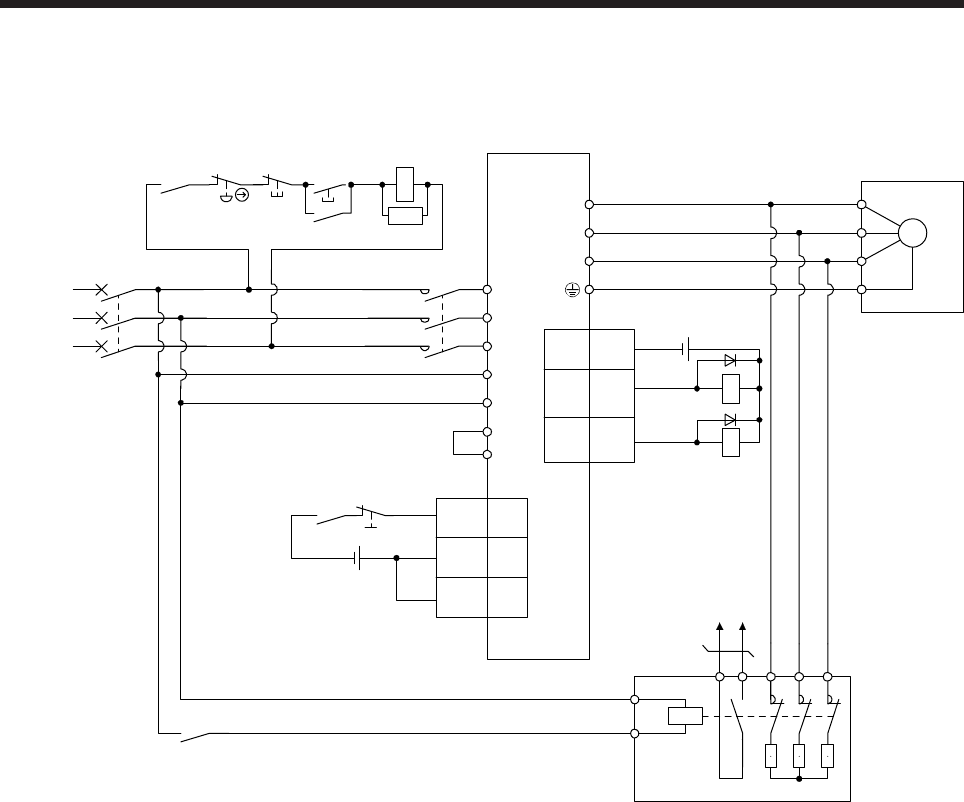
(2) Connection example
(a) 200 V class
EMG stop switch
L11
L21
U
V
W
U
V
W
E
M
Servo amplifier
Servo motor
L3
L2
L1
(Note 3)
Powe
r
supply
13 U14 V W
External dynamic brake
a
b
(Note 1)
ALM15
DB
(Note 2,
8)
DOCOM
3
CN3
RA2
MCCB
Operation read
y
MC
ALM
RA1
OFF ON
MC
SK
RA1
RA2
MC
Dynamick brake
interlock
(Note 4)
(Note 5)
Main circuit
power supply
24 V DC (Note 6)
5
DICOM
10
EM2 20
DICOM
CN3
24 V DC (Note 6)
P3
P4
(Note 7)
Note 1. Terminals 13 and 14 are normally open contact outputs. If the external dynamic brake is seized, terminals 13 and 14 will open.
Therefore, configure up an external sequence to prevent servo-on.
2.
A
ssign DB (Dynamic brake interlock) in [Pr. PD07] to [Pr. PD09].
3. For the power supply specifications, refer to section 1.3.
4. Depending on the main circuit voltage and operation pattern, bus voltage decreases, and that may cause the forced stop
deceleration to shift to the dynamic brake deceleration. When dynamic brake deceleration is not required, slow the time to turn
off the magnetic contactor.
5. Turn off EM2 when the main power circuit power supply is off.
6. The illustration of the 24 V DC power supply is divided between input signal and output signal for convenience. However, they
can be configured by one.
7. Between P3 and P4 is connected by default. When using the power factor improving DC reactor, remove the short bar
between P3 and P4. Refer to section 11.11 for details. Additionally, a power factor improving DC reactor and power factor
improving AC reactor cannot be used simultaneously.
8. The external dynamic brake cannot be used for compliance with SEMI-F47 standard. Do not assign DB (Dynamic brake
interlock) in [Pr. PD07] to [Pr. PD09]. Failure to do so will cause the servo amplifier to become servo-off when an
instantaneous power failure occurs.