



















3. SIGNALS AND WIRING
3 - 26
3.5.2 Output device
(1) Output device pin
The following shows the output device pins and parameters for assigning devices.
Connector pin No. Parameter Initial device I/O division
CN3-13 [Pr. PD07] MBR
CN3-15 [Pr. PD09] ALM DO-1
CN3-9 [Pr. PD08] INP
(2) Output device explanations
Device Symbol Function and application
Electromagnetic
brake interlock
MBR When using the device, set operation delay time of the electromagnetic brake in [Pr. PC02].
When a servo-off status or alarm occurs, MBR will turn off.
Malfunction ALM When the protective circuit is activated to shut off the base circuit, ALM will turn off.
When an alarm does not occur, ALM will turn on after 2.5 s to 3.5 s after power-on.
In-position INP When the number of droop pulses is in the in-position range, INP will turn on. The in-position range
can be changed using [Pr. PA10]. When the in-position range is increased, INP may be on during
low-speed rotation.
The device cannot be used in the speed control mode, torque control mode, and for continuous
operation to torque control mode.
Dynamic brake
interlock
DB When using the signal, enable it by the setting of [Pr. PD07] to [Pr. PD09].
DB turns off when the dynamic brake needs to operate. When using the external dynamic brake on
the servo amplifier of 11 kW or more, this device is required. (Refer to section 11.17.)
For the servo amplifier of 7 kW or less, it is not necessary to use this device.
The external dynamic brake cannot be used with 11 kW or more servo amplifier for compliance
with SEMI-F47 standard. Do not assign DB (Dynamic brake interlock) in [Pr. PD07] to [Pr. PD09].
Failure to do so will cause the servo amplifier to become servo-off when an instantaneous power
failure occurs.
Ready RD Enabling servo-on to make the servo amplifier ready to operate will turn on RD.
Speed reached SA SA will turn off during servo-off. When the servo motor speed reaches the following range, SA will
turn on. Set speed ± ((Set speed × 0.05) + 20) r/min
When the preset speed is 20 r/min or less, SA always turns on.
The device cannot be used in the position control mode and torque control mode.
Limiting speed VLC When the speed reaches the speed limit value in the torque control mode, VLC will turn on. When
the servo is off, TLC will be turned off.
The device cannot be used in the position control mode and speed control mode.
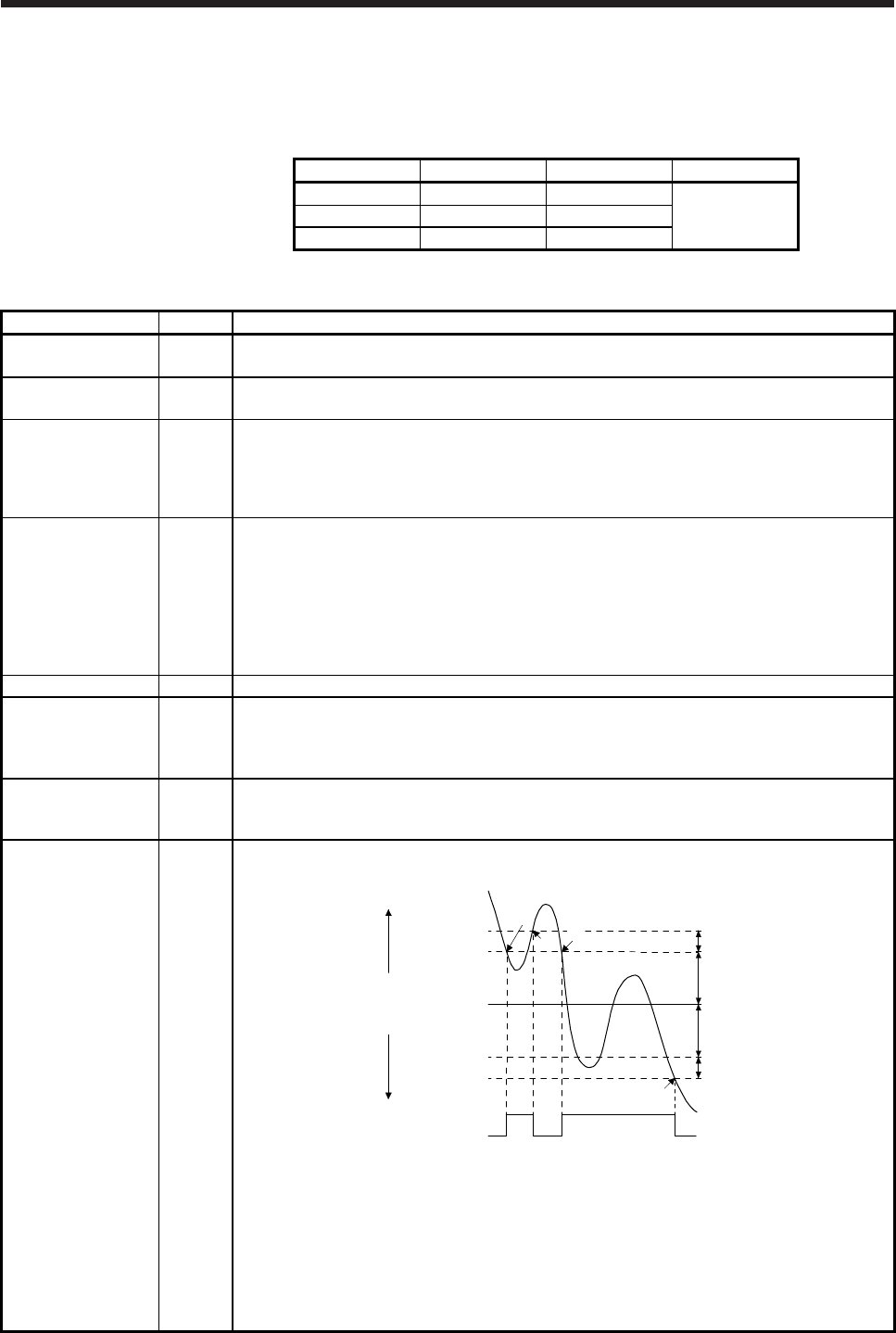
Zero speed detection ZSP ZSP turns on when the servo motor speed is zero speed (50r/min) or less. Zero speed can be
changed with [Pr. PC07].
OFF
ON
Servo motor
speed
20 r/min
(Hysteresis width)
[Pr. PC07]
20 r/min
(Hysteresis width)
OFF level
-70 r/min
ON level
-50 r/min
ON level
50 r/min
OFF level
70 r/min
0 r/min
[Pr. PC07]
ZSP
(Zero speed
detection)
1)
3)
2)
4)
Forward
rotation
direction
Reverse
rotation
direction
ZSP will turn on when the servo motor is decelerated to 50 r/min (at 1)), and will turn off when the
servo motor is accelerated to 70 r/min again (at 2)).
ZSP will turn on when the servo motor is decelerated again to 50 r/min (at 3)), and will turn off
when the servo motor speed has reached -70 r/min (at 4)).
The range from the point when the servo motor speed has reached on level, and ZSP turns on, to
the point when it is accelerated again and has reached off level is called hysteresis width.
Hysteresis width is 20 r/min for this servo amplifier.
When you use a linear servo motor, [r/min] explained above will be [mm/s].