



















17. APPLICATION OF FUNCTIONS
17 - 65
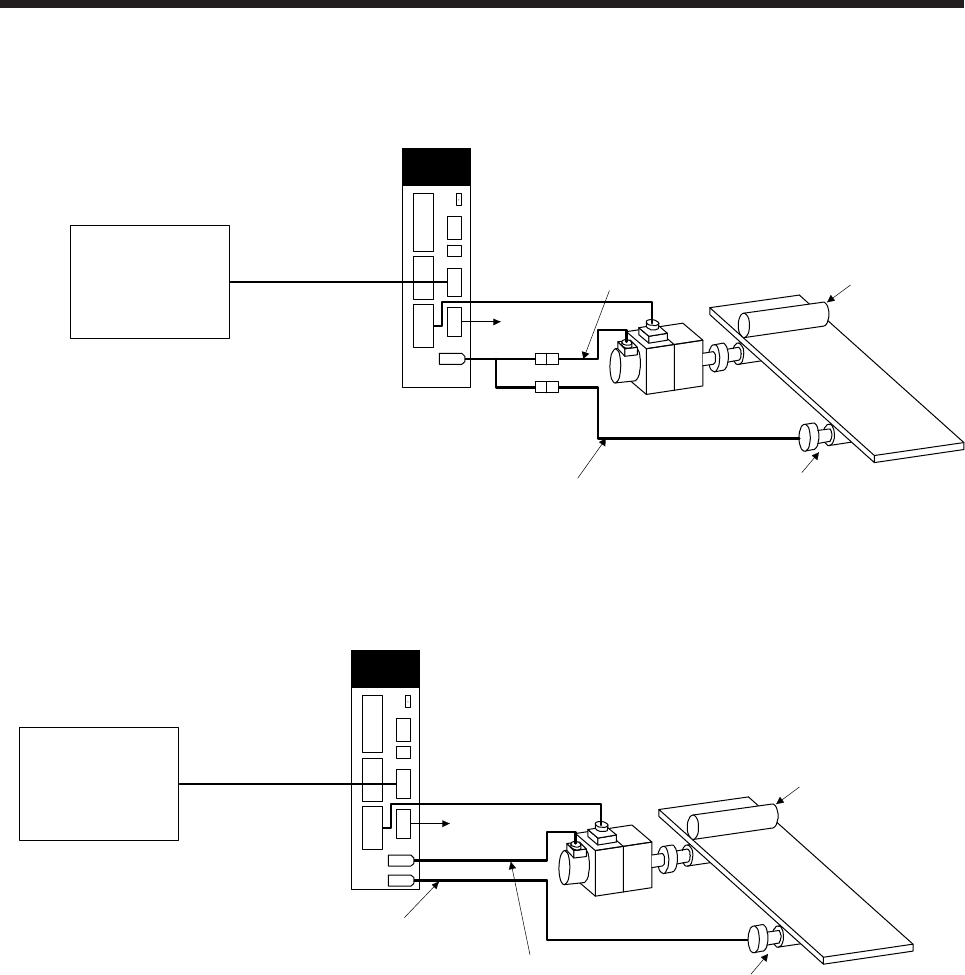
(b) For a rotary encoder
1) MR-J4-_B_ servo amplifier
Servo motor
Two-wire type rotary encoder
HG-KR, HG-MR servo motor (4194304 pulses/rev)
Drive part
Servo amplifier
CN2
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
To the next
servo
amplifier
(Note)
(Note)
Servo motor encoder signal
Load-side encoder signal
Note. Use a two-wire type encoder cable. A four-wire type linear encoder cable cannot be used.
2) MR-J4-_B_-RJ servo amplifier
Servo motor
A/B/Z-phase differential output, two-wire/four-wire type rotary encode
r
HG-KR, HG-MR servo motor (4194304 pulses/rev), or
synchronous encoder Q171ENC-W8 (4194304 pulses/rev)
Drive part
Servo amplifier
CN2
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
To the next
servo
amplifier
CN2L
Load-side encoder signal
Servo motor encoder signal