


















16. FULLY CLOSED LOOP SYSTEM
16 - 20
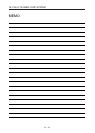
(a) When using a linear encoder (unit setting: mm)
Differentiation
AP
AL
Servo motor Linear encode
r
Position feedback
[mm]
Command
[mm]
+
-
Speed feedback
[r/min]
AL
AP
Electronic
gear
User Control
Servo amplifier
Load-side encoder resolution unit
Load-side encoder
resolution unit
Servo motor speed
Calculate the number of pulses (AP) and travel distance (AL) of the linear encoder per ball screw
revolution in the following conditions.
Ball screw lead: 20 mm
Linear encoder resolution: 0.05 µm
Number of linear encoder pulses (AP) per ball screw revolution
= Ball screw lead/linear encoder resolution= 20 mm/0.05 µm = 400000 pulses
Number of pulses per revolution [pulse] (AP)
Travel distance per revolution [µm] (AL)
=
400000 pulses
20 mm
=
400000
20000
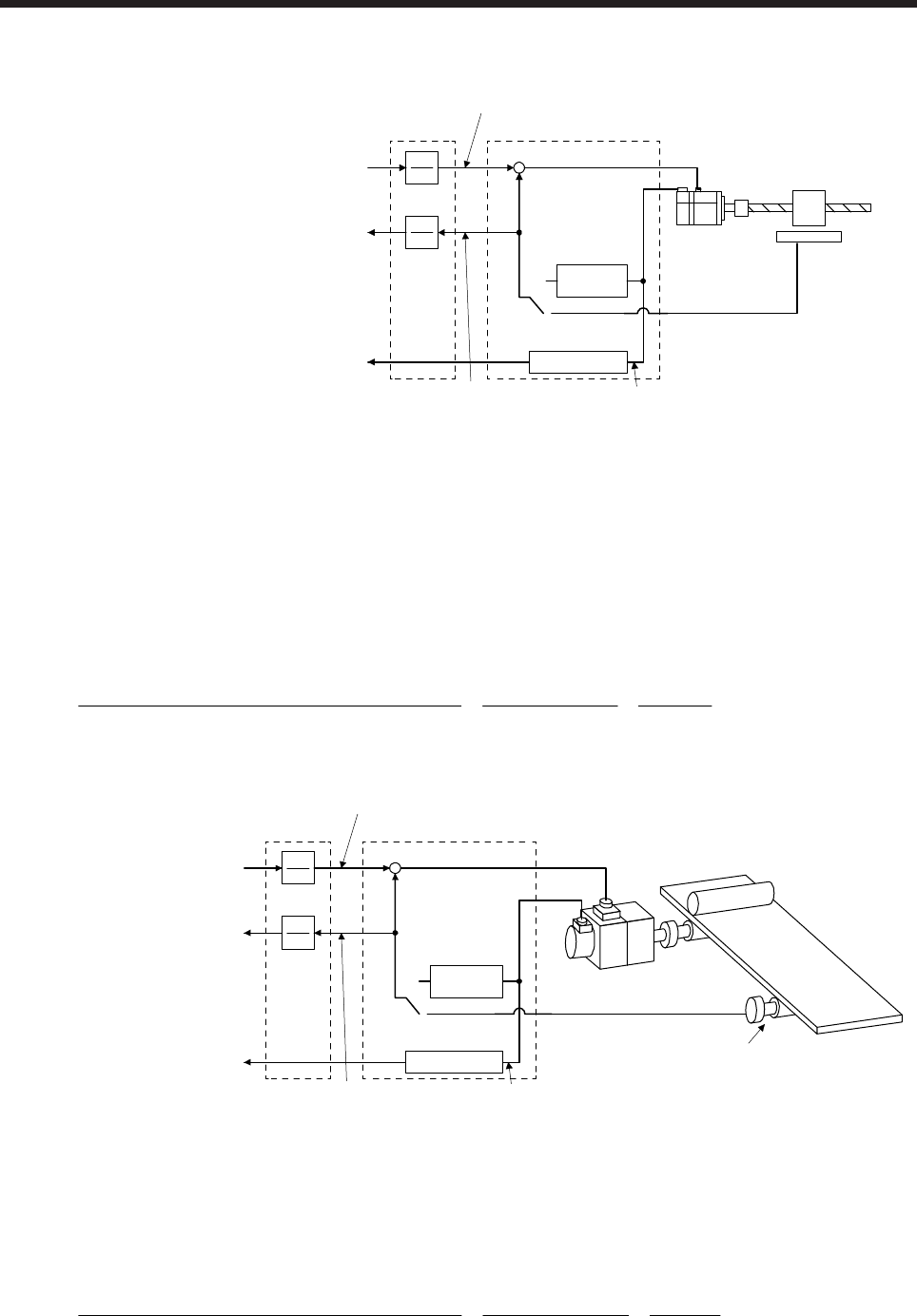
(b) When using a rotary encoder (unit setting: degree)
Servo motor
Rotary encoder
(HG-KR or HG-MR servo motor)
4194304 pulses/rev
AP
AL
Position feedback
[degree]
Command
[degree]
+
-
Speed feedback
[r/min]
AL
AP
Electronic
gear
User Control Servo amplifier
Load-side encoder resolution uni
t
Load-side encoder
resolution unit
Servo motor speed
Differentiation
Calculate the number of pulses (AP) and travel distance (AL) of the rotary encoder per servo motor
revolution in the following conditions.
Resolution of rotary encoder = Load-side resolution: 4194304 pulses/rev
Number of pulses per revolution [pulse] (AP)
Travel distance per revolution [degree] (AL)
=
4194304 pulses
360 degrees
=
524288
45