

















5. PARAMETERS
5 - 37
No. Symbol Name and function
Initial
value
[unit]
Setting
range
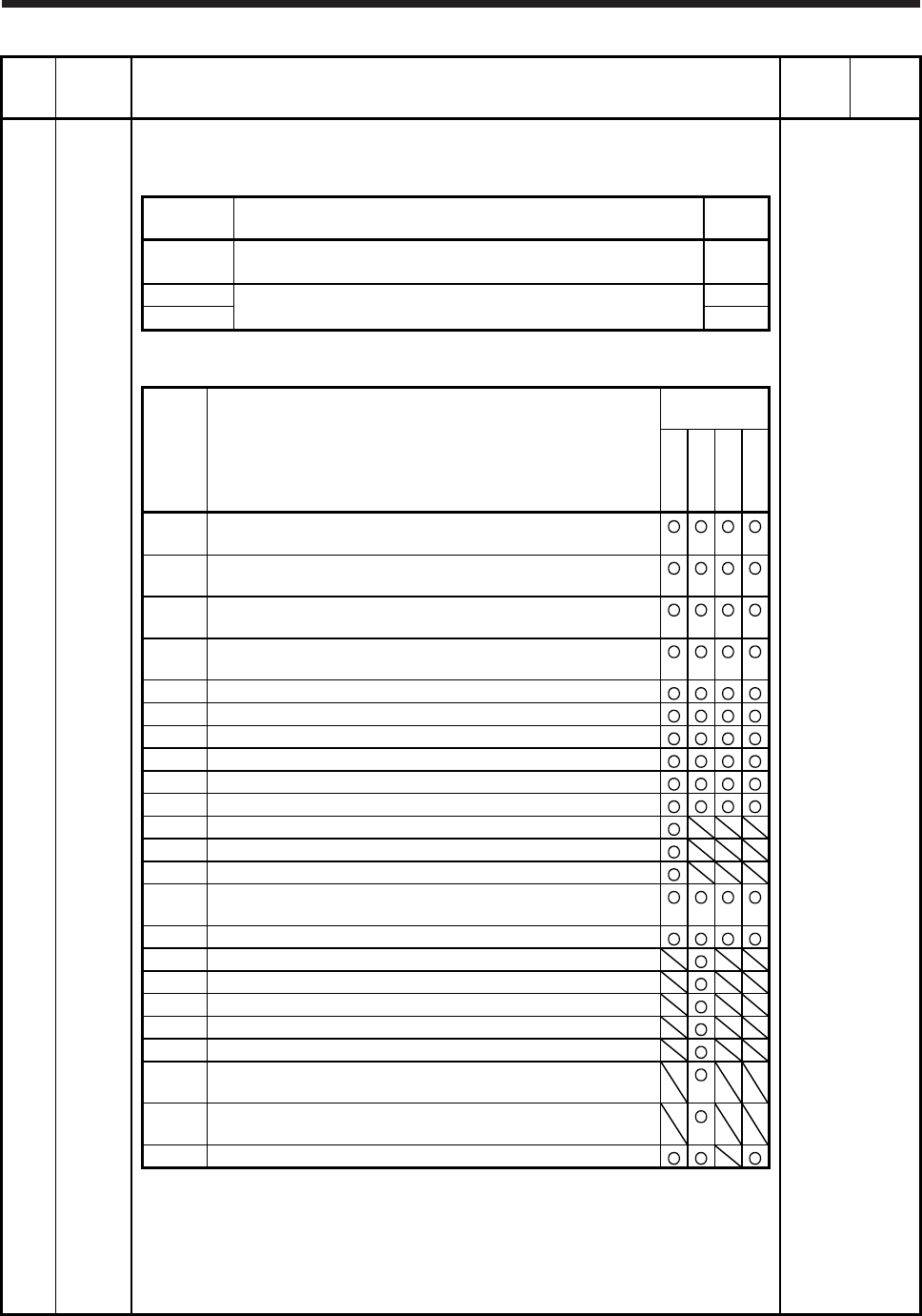
PC09 MOD1 Analog monitor 1 output
Select a signal to output to MO1 (Analog monitor 1). Refer to appendix 11 (3) for detection
point of output selection.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x Analog monitor 1 output selection
Refer to table 5.7 for settings.
00h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
Table 5.7 Analog monitor setting value
Setting
value
Item
Operation
mode (Note 1)
Standard
Full.
Lin.
D.D.
00 (Linear) servo motor speed
(±8 V/max. speed)
01 Torque or thrust
(±8 V/max. torque or max. thrust)
02 (Linear) servo motor speed
(+8V/max. speed)
03 Torque or thrust
(+8 V/max. torque or max. thrust)
04 Current command (±8 V/max. current command)
05 Speed command (±8 V/max. speed)
06 Servo motor-side droop pulses (±10 V/100 pulses) (Note 2)
07 Servo motor-side droop pulses (±10 V/1000 pulses) (Note 2)
08 Servo motor-side droop pulses (±10 V/10000 pulses) (Note 2)
09 Servo motor-side droop pulses (±10 V/100000 pulses) (Note 2)
0A Feedback position (±10 V/1 Mpulse) (Note 2)
0B Feedback position (±10 V/10 Mpulses) (Note 2)
0C Feedback position (±10 V/100 Mpulses) (Note 2)
0D Bus voltage (200 V class and 100 V class: +8 V/400 V, 400 V
class: +8 V/800 V)
0E Speed command 2 (±8 V/max. speed)
10 Load-side droop pulses (±10 V/100 pulses) (Note 2)
11 Load-side droop pulses (±10 V/1000 pulses) (Note 2)
12 Load-side droop pulses (±10 V/10000 pulses) (Note 2)
13 Load-side droop pulses (±10 V/100000 pulses) (Note 2)
14 Load-side droop pulses (±10 V/1 Mpulse) (Note 2)
15 Servo motor-side/load-side position deviation
(±10 V/100000 pulses)
16 Servo motor-side/load-side speed deviation
(±8 V/max. speed)
17 Encoder inside temperature (±10 V/±128 ˚C)
Note 1. Items with ○ are available for each operation mode.
Standard: Standard (semi closed loop system) use of the rotary servo motor
Full.: Fully closed loop system use of the rotary servo motor
Lin.: Linear servo motor use
D.D.: Direct drive (D.D.) motor use
2. Encoder pulse unit