



















16. FULLY CLOSED LOOP SYSTEM
16 - 18
POINT
To execute a home position return securely, start a home position return after
moving the axis to the opposite stroke end by jog operation, etc. of the
controller.
A home position return cannot be made if the incremental linear encoder does
not have a linear encoder home position (reference mark). Always provide a
linear encoder home position (reference mark). (one place in the fully stroke)
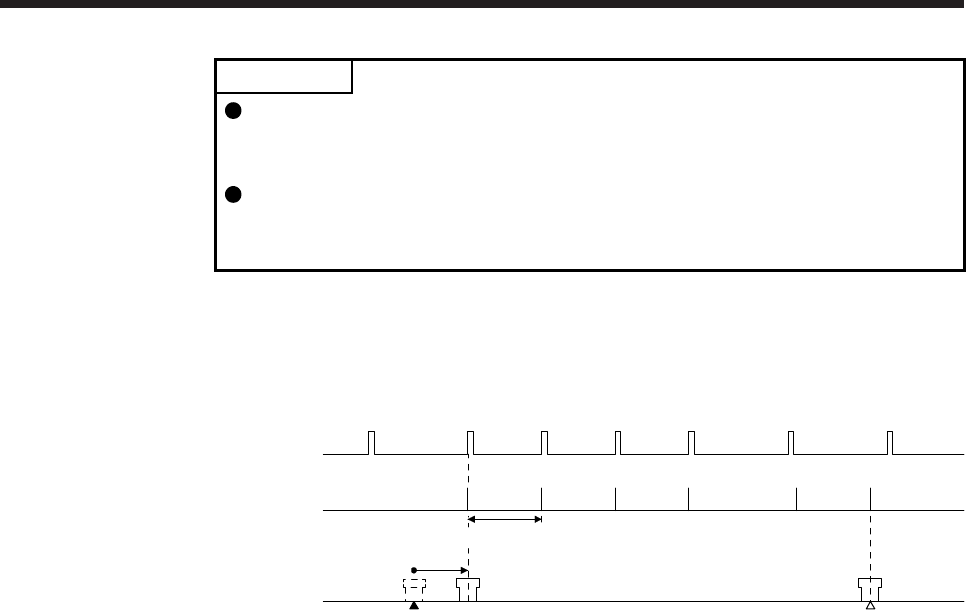
(c) About dog type home position return when using the rotary encoder of a serial communication servo
motor
The home position for when using the rotary encoder of a serial communication servo motor for the
load-side encoder is at the load-side Z-phase position.
Servo amplifier
power-on position
Home position
ON
OFF
Load-side encoder
Z-phase signal
Reference home position
Machine position
Equivalent to one servo motor revolution
(d) About data setting type (Common to all load-side encoders)
In the data setting type home position return method, pass through a scale home position (reference
mark) and the Z-phase signal of the rotary encoder, and then make a home position return.
When the machine has no distance of one servo motor encoder revolution until the Z-phase of the
rotary encoder is passed through, a home position return can be made by changing the home
position setting condition selection in [Pr. PC17] if the home position is not yet passed through.