

















12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 3
12.2 Battery
12.2.1 Using MR-BAT6V1SET battery
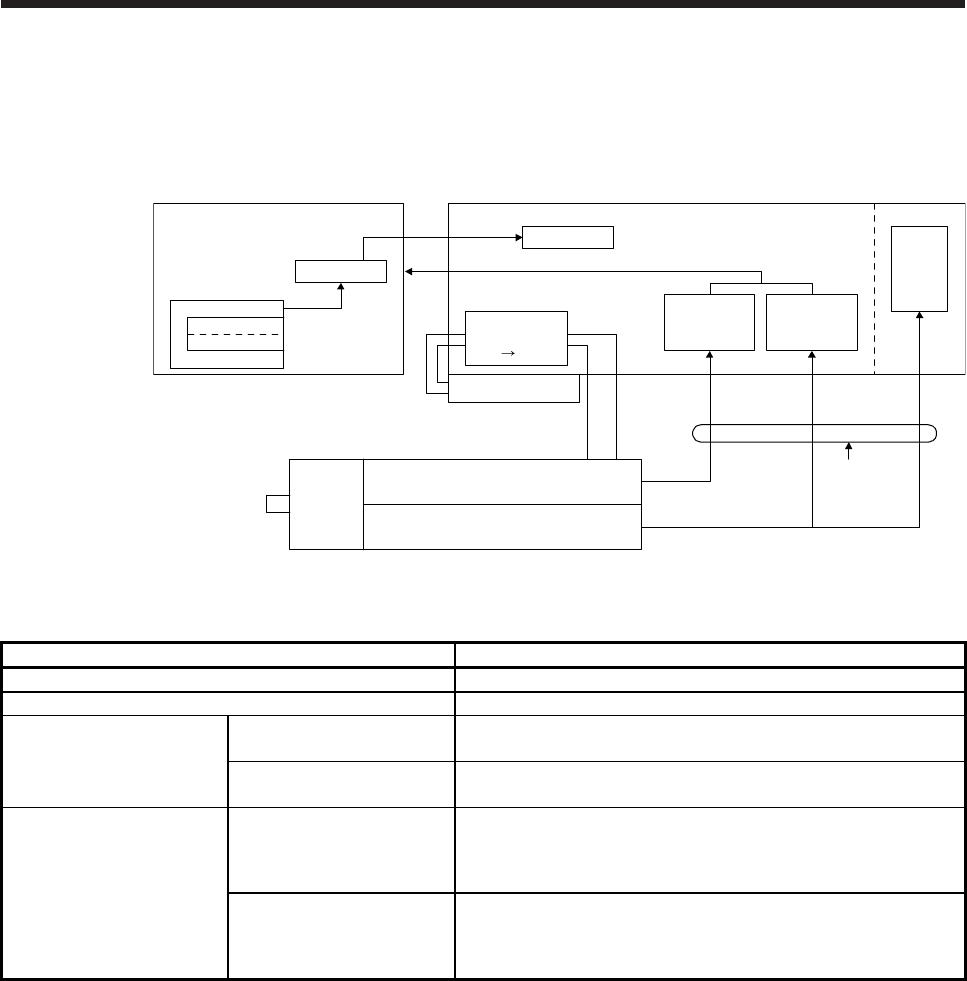
(1) Configuration diagram
CYC0
Current position
Home position data
LS0
Position data
LS
Detecting the
number of
revolutions
CYC
Detecting the
position at
one revolution
Servo motor
Cumulative revolution counter
(1 pulse/rev)
One-revolution counter
High speed
serial
communication
Servo amplifierServo system controller
MR-BAT6V1SET
Battery
Position control
Speed control
Step-down
circuit
(6 V 3.4 V)
(2) Specifications
(a) Specification list
Item Description
System Electronic battery backup type
Maximum revolution range Home position ± 32767 rev.
(Note 1)
Maximum speed at power
failure [r/min]
Rotary servo motor
6000
(only when acceleration time until 6000 r/min is 0.2 s or more)
Direct drive motor
500
(only when acceleration time until 500 r/min is 0.1 s or more)
(Note 2)
Battery backup time
Rotary servo motor
Approximately 20,000 hours
(equipment power supply: off, ambient temperature: 20 ˚C)
Approximately 29,000 hours
(power-on time ratio: 25%, ambient temperature: 20 °C) (Note 3)
Direct drive motor
Approximately 5,000 hours
(equipment power supply: off, ambient temperature: 20 ˚C)
Approximately 15,000 hours
(power-on time ratio: 25%, ambient temperature: 20 °C) (Note 3)
Note 1. Maximum speed available when the shaft is rotated by external force at the time of power failure or the like. Also, if power is
switched on at the servo motor speed of 3000 r/min or higher, position mismatch may occur due to external force or the like.
2. The data-holding time by the battery using MR-BAT6V1SET. Replace the batteries within three years since the operation start
regardless of the power supply of the servo amplifier on/off. If the battery is used out of specification, [AL. 25 Absolute position
erased] may occur.
3. The power-on time ratio 25% is equivalent to 8 hours power on for a weekday and off for a weekend.