



















15. USING A DIRECT DRIVE MOTOR
15 - 14
15.3.3 Operation from controller
To configure the absolute position detection system by using the direct drive motor, the battery and the
absolute position storage unit MR-BTAS01 are required.
(1) Operation method
For the incremental system, the magnetic pole detection is automatically performed at the first servo-on
after the power-on. For this reason, when performing the positioning operation, create the sequence
which surely confirms the servo-on status as the inter lock condition of the positioning command.
Also, some parameter settings and the home position return differ according to the controller type.
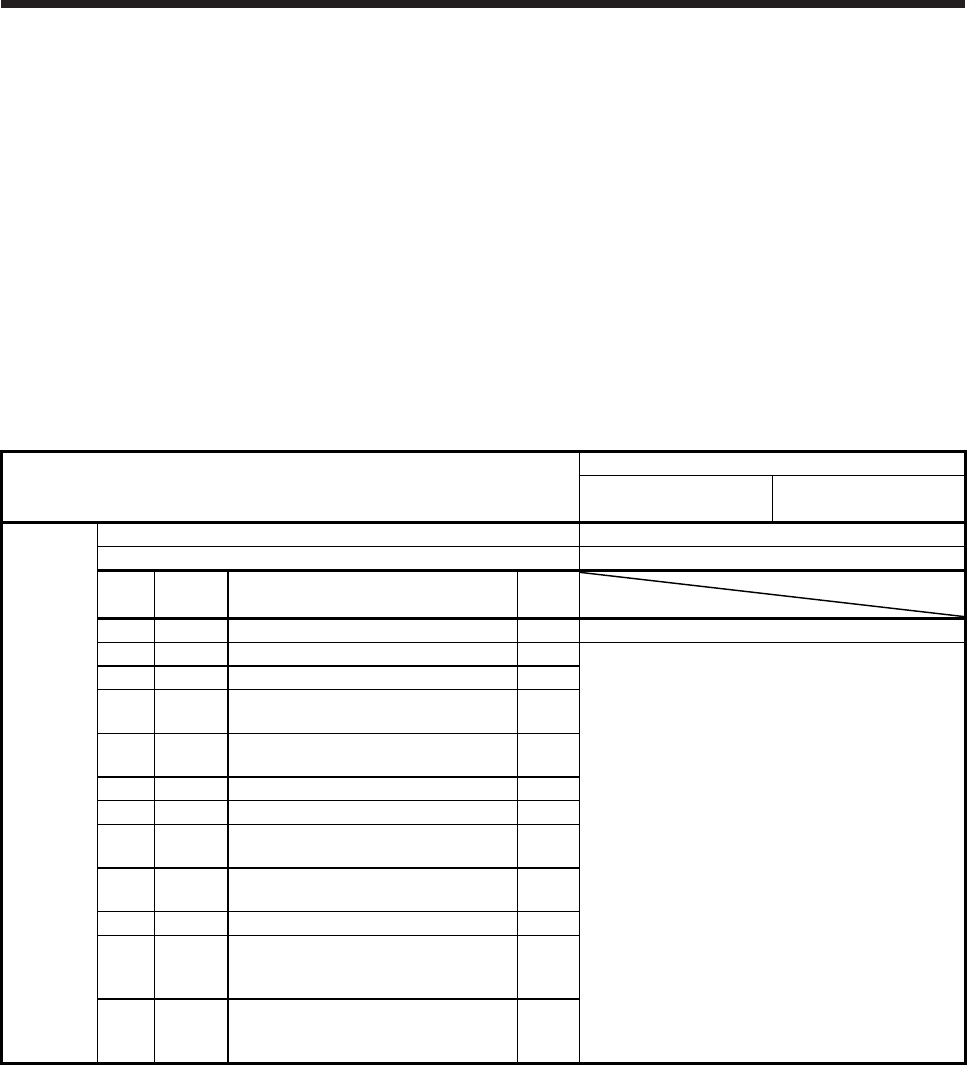
(2) Servo system controller setting
The following parameters will be enabled by cycling the servo amplifier power after the controller writes
the parameters to the servo amplifier.
Setting item
Setting
Motion controller
R_MTCPU/Q17_DSCPU
Simple motion module
RD77MS_/QD77MS_
Parameter
Amplifier setting MR-J4-B DD
Motor setting Automatic setting
No.
(Note)
Symbol
Name
Initial
value
PA01 **STY Operation mode 1000h 1060h
PC01 *ERZ Error excessive alarm level 0
Set the items as required.
PC03 *ENRS Encoder output pulse selection 0000h
PL01 **LIT1
Linear servo motor/DD motor function
selection 1
0301h
PL04 *LIT2
Linear servo motor/DD motor function
selection 2
0003h
PL05 LB1 Position deviation error detection level 0
PL06 LB2 Speed deviation error detection level 0
PL07 LB3
Torque/thrust deviation error detection
level
100
PL08 *LIT3
Linear servo motor/DD motor function
selection 3
0010h
PL09 LPWM Magnetic pole detection voltage level 30
PL17 LTSTS
Magnetic pole detection - Minute
position detection method - Function
selection
0000h
PL18 IDLV
Magnetic pole detection - Minute
position detection method -
Identification signal amplitude
0
Note. The parameter whose symbol is preceded by * is enabled with the following conditions.
* : After setting the parameter, power off and on the servo amplifier or reset the controller.
**: After setting the parameter, power off and on the servo amplifier.