

















5. PARAMETERS
5 - 36
No. Symbol Name and function
Initial
value
[unit]
Setting
range
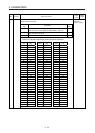
PC04 **COP1 Function selection C-1
Select the encoder cable communication method selection.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _ Encoder cable communication method selection
0: Two-wire type
1: Four-wire type
When using an encoder of A/B/Z-phase differential output method,
set "0".
Incorrect setting will result in [AL. 16 Encoder initial communication
error 1]. Or [AL. 20 Encoder initial communication error 1] will
occur. Setting "1" will trigger [AL. 37] while "Fully closed loop
control mode (_ _ 1 _)" is selected in [Pr. PA01] (except MR-J4-
_B_-RJ).
0h
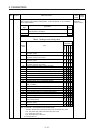
PC05 **COP2 Function selection C-2
Set the motor-less operation and [AL. 9B Error excessive warning]. The motor-less operation
is not available in the linear servo motor control mode, fully closed loop control, and DD motor
control mode.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Motor-less operation selection
0: Disabled
1: Enabled
0h
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ [AL. 9B Error excessive warning] selection
0: [AL. 9B Error excessive warning] disabled
1: [AL. 9B Error excessive warning] enabled
The setting of this digit is used by servo amplifier with software
version B4 or later.
0h
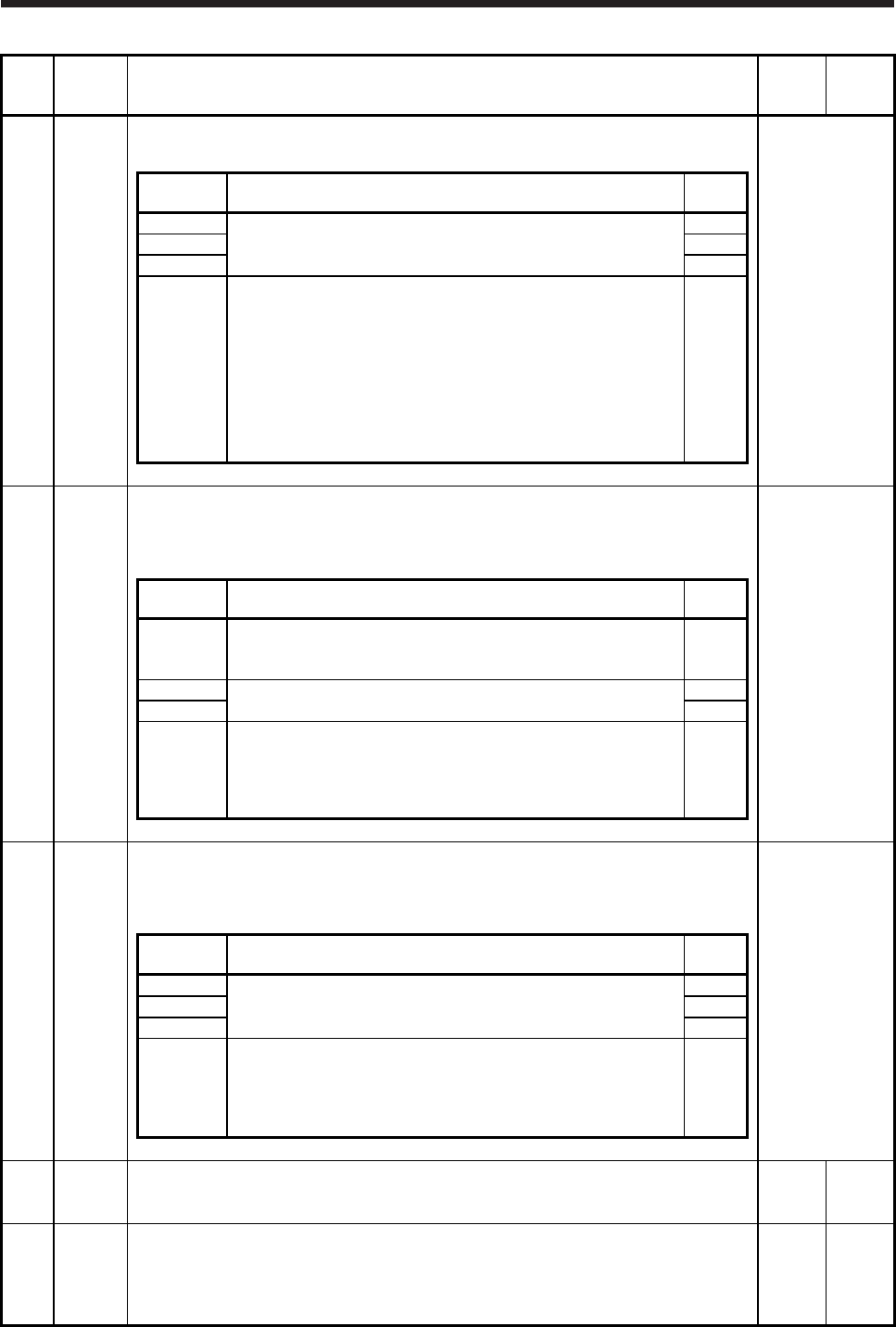
PC06 *COP3 Function selection C-3
Select units for error excessive alarm level setting with [Pr. PC01] and for error excessive
warning level setting with [Pr. PC38]. The parameter is not available in the speed control
mode and torque control mode.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _ Error excessive alarm/error excessive warning level unit selection
0: Per 1 rev or 1 mm
1: Per 0.1 rev or 0.1 mm
2: Per 0.01 rev or 0.01 mm
3: Per 0.001 rev or 0.001 mm
0h
PC07 ZSP Zero speed
Used to set the output range of ZSP (Zero speed detection).
ZSP (Zero speed detection) has hysteresis of 20 r/min or 20 mm/s.
50
[r/min]/
[mm/s]
0
to
10000
PC08 OSL Overspeed alarm detection level
This is used to set an overspeed alarm detection level.
When you set a value more than "servo motor maximum speed × 120%" or "linear servo motor
maximum speed × 120%", the set value will be clamped.
When you set "0", the value of "(linear) servo motor maximum speed × 120%" will be set.
0
[r/min]/
[mm/s]
0
to
20000