



















14. USING A LINEAR SERVO MOTOR
14 - 16
(a) For the incremental linear encoder
POINT
For the incremental linear encoder, the magnetic pole detection is required
every time the power is turned on.
By turning on the servo-on command from the controller after the power-on, the magnetic pole
detection is automatically carried out. Therefore, there is not need to set the parameter (first digit of
[Pr. PL01]) for executing the magnetic pole detection.
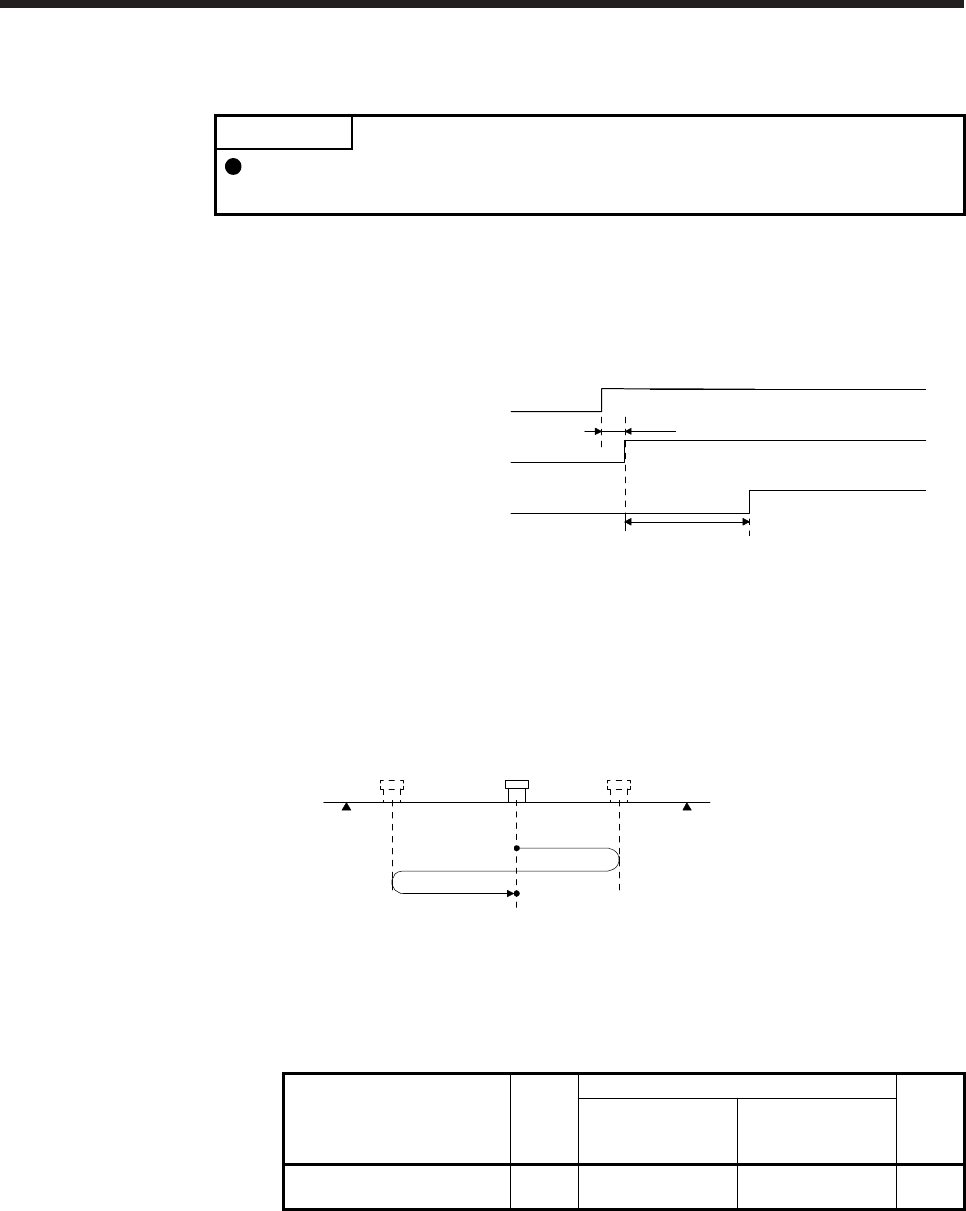
1) Timing chart
15 s or less
ON
OFF
ON
OFF
ON
OFF
95 ms
Servo-on command
Base circuit
RD (Ready)
Magnetic pole detection time (Note)
Note. The magnetic pole detection time indicates the operation time when FLS (Upper
stroke limit) and RLS (Lower stroke limit) are on.
2) Linear servo motor movement (when FLS (Upper stroke limit) and RLS (Lower stroke limit) are
on)
RLS
(Note 1)
FLS
(Note 1)
(Note 2)
Magnetic pole detection completion position
Servo-on position
(Magnetic pole detection start position)
Note 1. When FLS (Upper stroke limit) or RLS (Lower stroke limit) turns off during the magnetic pole detection, the operation of the
magnetic pole detection is carried on to the opposite direction. When both FLS and RLS are off, [AL. 27 Initial magnetic pole
detection error] occurs.
2. The following shows the pitch against the magnetic pole.
Linear servo motor series
LM-H3
LM-F
LM-U2
LM-K2
Medium thrust
(Continuous thrust:
Less than 400 N)
Large thrust
(Continuous thrust:
400 N or more)
Pitch against magnetic pole
[mm]
48 30 60 48