



















3 - 6
3. SIGNALS AND WIRING
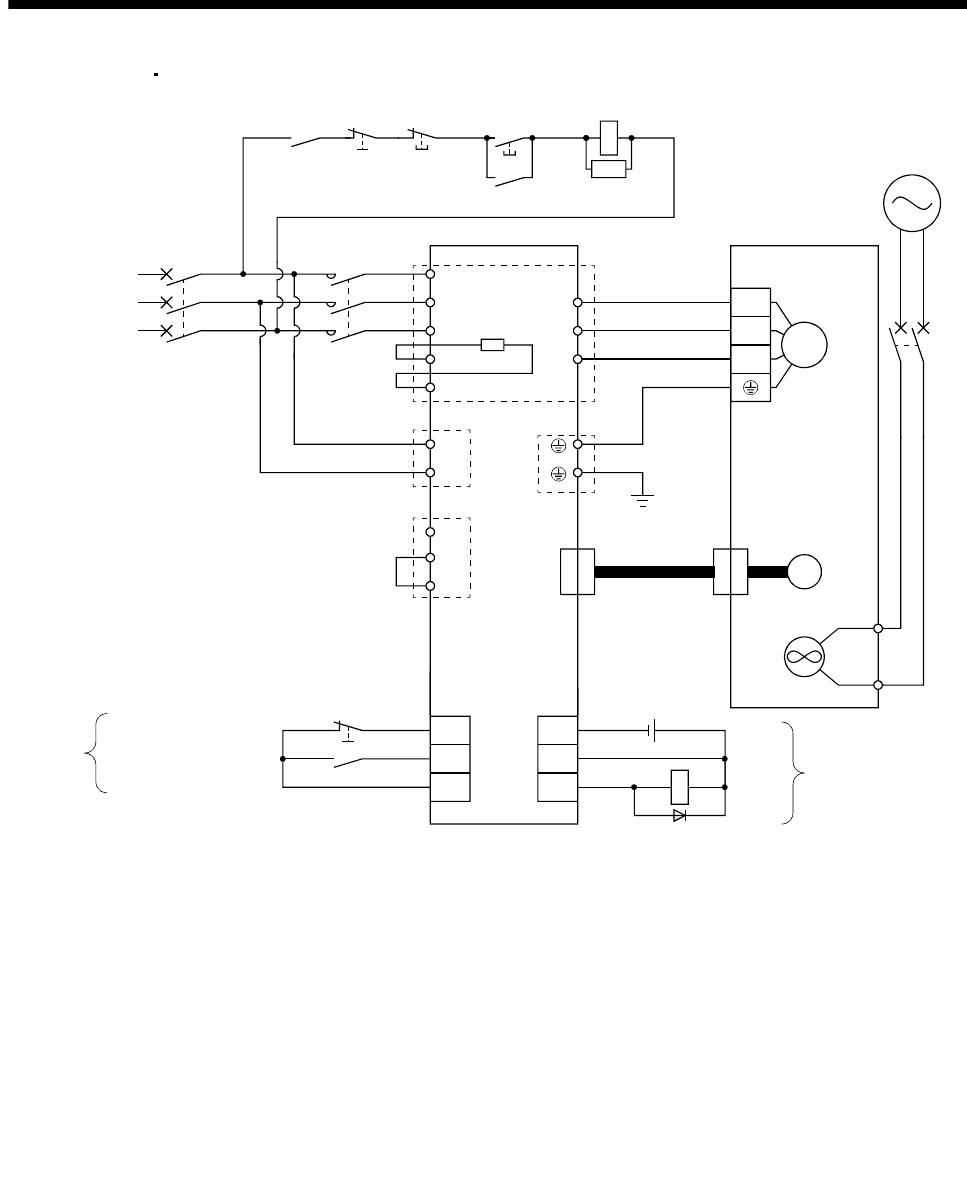
(5) MR-J3-500A MR-J3-700A
TE1
TE2
TE3
Built-in
regenerative
resistor
Cooling fan
BU
BV
NFB
(Note 6)
Power supply
of cooling fan
P
N
(Note 4)
SON
EMG
L
1
L
2
L3
3-phase
200 to
230VAC
ALM
P
1
P2
DICOM
DOCOM
L
11
L
21
C
U
V
W
(Note 1)
(Note 2)
PE
U
V
W
M
Motor
Encoder
CN2
(Note 3)
Encoder cable
(Note 5)
DOCOM
CN1 CN1
24VDC
Trouble
(Note 4)
MCNFB
RA
Servo motorServo amplifier
Emergency stop (Note 7)
Servo-on
(Note 8)
Trouble
RA
Emergency stop
OFF
MC
ON
MC
SK
(Note 7)
Note 1. Always connect P1 and P2. (Factory-wired.) When using the power factor improving DC reactor, refer to section 12.13. Use only
one of power factor improving DC reactor or power factor improving AC reactor.
2. When using the regenerative option, refer to section 12.2.
3. For encoder cable, use of the option cable is recommended. Refer to section 12.1 for selection of the cable.
4. For the sink I/O interface. For the source I/O interface, refer to section 3.8.3.
5. Refer to section 3.10.
6. A cooling fan is attached to the HA-LP601 and the HA-LP701M servo motors. For power supply specification of the cooling fan,
refer to section 3.10.2 (3) (b).
7. Configure the circuit to shut down the main circuit power supply simultaneously with the turn off of emergency stop (EMG) using
the external sequence.
8. Be sure to use a magnetic contactor with an operation delay time of 80ms or less. The operation delay time is the time interval
between current being applied to the coil until closure of contacts.