


















5 - 23
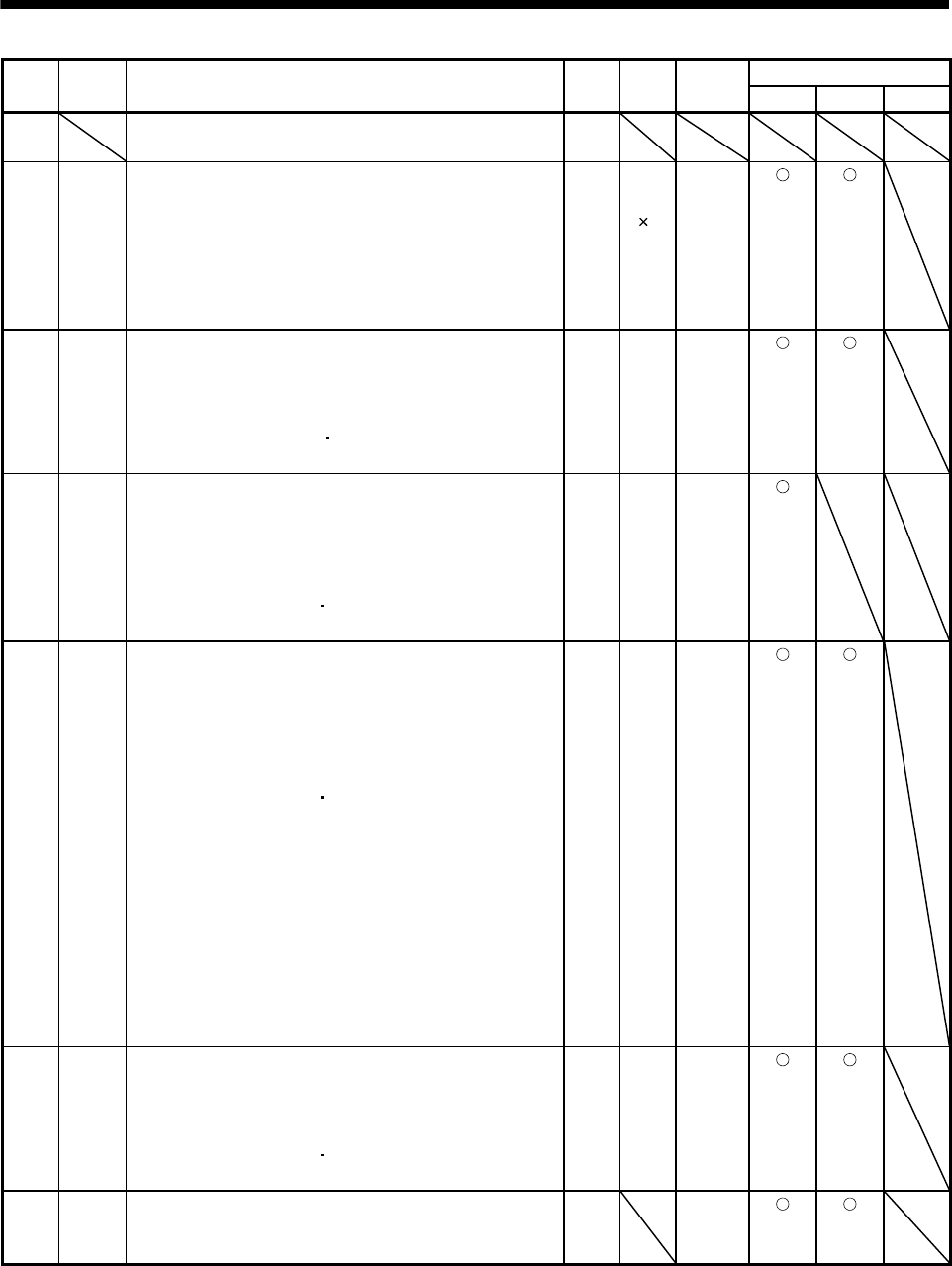
5. PARAMETERS
No. Symbol Name and function
Initial
value
Unit
Setting
range
Control mode
Position Speed Torque
PB05 For manufacturer setting
Do not change this value by any means.
500
PB06 GD2 Ratio of load inertia moment to servo motor inertia moment
Used to set the ratio of the load inertia moment to the servo
motor shaft inertia moment. When auto tuning mode 1 and
interpolation mode is selected, the result of auto tuning is
automatically used.
(Refer to section 7.1.1)
In this case, it varies between 0 and 100.0.
7.0 Multi-
plier
(
1)
0
to
300.0
PB07 PG1 Model loop gain
Set the response gain up to the target position.
Increase the gain to improve track ability in response to the
command.
When auto turning mode 1
2 is selected, the result of auto
turning is automatically used.
24 rad/s 1
to
2000
PB08 PG2 Position loop gain
Used to set the gain of the position loop.
Set this parameter to increase the position response to level
load disturbance. Higher setting increases the response
level but is liable to generate vibration and/or noise.
When auto tuning mode 1
2 and interpolation mode is
selected, the result of auto tuning is automatically used.
37 rad/s 1
to
1000
PB09 VG2 Speed loop gain
Used to set the gain of the speed loop.
Set this parameter when vibration occurs on machines of
low rigidity or large backlash.
Higher setting increases the response level but is liable to
generate vibration and/or noise.
When auto tuning mode 1
2, manual mode and
interpolation mode is selected, the result of auto tuning is
automatically used.
Note. The setting range of 50000 applies to the servo
amplifier whose software version is A3 or later. The
setting range of the servo amplifier whose software
version is older than A3 is 20 to 20000. When the
software version of MR Configurator is A3 or earlier,
20001 or more cannot be set. Use the
display/operation section of the servo amplifier to set
20001 or more.
823 rad/s 20
to
50000
(Note)
PB10 VIC Speed integral compensation
Used to set the integral time constant of the speed loop.
Lower setting increases the response level but is liable to
generate vibration and/or noise.
When auto tuning mode 1
2 and interpolation mode is
selected, the result of auto tuning is automatically used.
33.7 ms 0.1
to
1000.0
PB11 VDC Speed differential compensation
Used to set the differential compensation.
Made valid when the proportion control (PC) is switched on.
980 0
to
1000