



















5 - 9
5. PARAMETERS
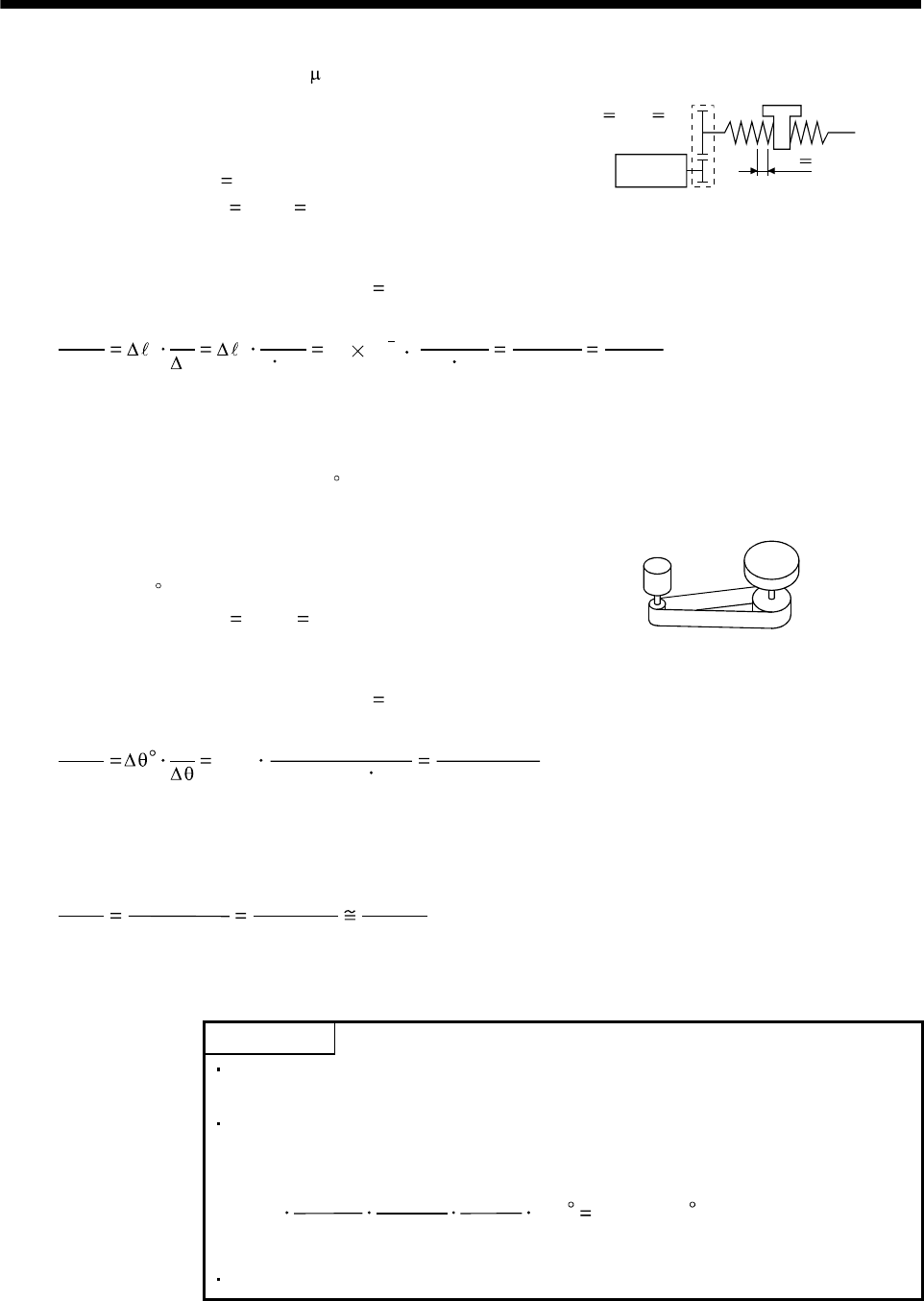
(a) For motion in increments of 10
m per pulse
Machine specifications
Ball screw lead Pb
10 [mm]
Reduction ratio: 1/n
Z1/Z2
1/2
Z
1: Number of gear teeth at the servo motor side
Z
2: Number of gear teeth at the load side
Encoder resolution of servo motor
262144[pulse/rev]
Pb 10[mm]
Z
1
1/n
1/n Z1/Z2 1/2
Z
2
Encoder resolution of servo motor: Pt 262144 [pulse/rev]
CDV
CMX
0
Pt
S
0
Pt
n Pb
10
10
3
1/2 10
262144
524288
1000
65536
125
Hence, set 65538 to CMX and 125 to CDV.
(b) Conveyor setting example
For rotation in increments of 0.01
per pulse
Machine specifications
Table : 360
/rev
Reduction ratio: 1/n
P1/P2 625/12544
P
1: Pulley diameter at the servo motor side
P
2: Pulley diameter at the load side
Encoder resolution of servo motor
262144[pulse/rev]
Table
Timing belt: 625/12544
Encoder resolution of servo motor: Pt 262144 [pulse/rev]
CDV
CMX
Pt 262144 102760448
703125
0.01
625/12544 360
................................................................... (5.1)
Since CMX is not within the setting range in this status, it must be reduced to the lowest term.
When CMX has been reduced to a value within the setting range, round off the value to the nearest unit.
CDV
CMX
102760448
703125
822083.6
5625
822084
5625
Hence, set 822084 to CMX and 5625 to CDV.
POINT
For unlimited one-way rotation, e.g. an index table, indexing positions will be
missed due to cumulative error produced by rounding off.
For example, entering a command of 36000 pulses in the above example causes
the table to rotate only.
822084
5625
36000
1
262144
625
12544
360 360.00018
Therefore, indexing cannot be done in the same position on the table.