



















5 - 1
5. PARAMETERS
5. PARAMETERS
CAUTION
Never adjust or change the parameter values extremely as it will make operation
instable.
When a fixed number is indicated in each digit of a parameter, do not change the
value by any means.
In this servo amplifier, the parameters are classified into the following groups on a function basis.
Parameter group Main description
Basic setting parameters
(No.PA
)
When using this servo amplifier in the position control mode, make basic setting with these
parameters.
Gain/filter parameters
(No.PB
)
Use these parameters when making gain adjustment manually.
Extension setting parameters
(No.PC
)
When using this servo amplifier in the speed control mode or torque control mode, mainly use
these parameters.
I/O setting parameters
(No.PD
)
Use these parameters when changing the I/O signals of the servo amplifier.
When using this servo in the position control mode, mainly setting the basic setting parameters (No.PA
)
allows the setting of the basic parameters at the time of introduction.
5.1 Basic setting parameters (No.PA
)
POINT
For any parameter whose symbol is preceded by *, set the parameter value and
switch power off once, then switch it on again to make that parameter setting
valid.
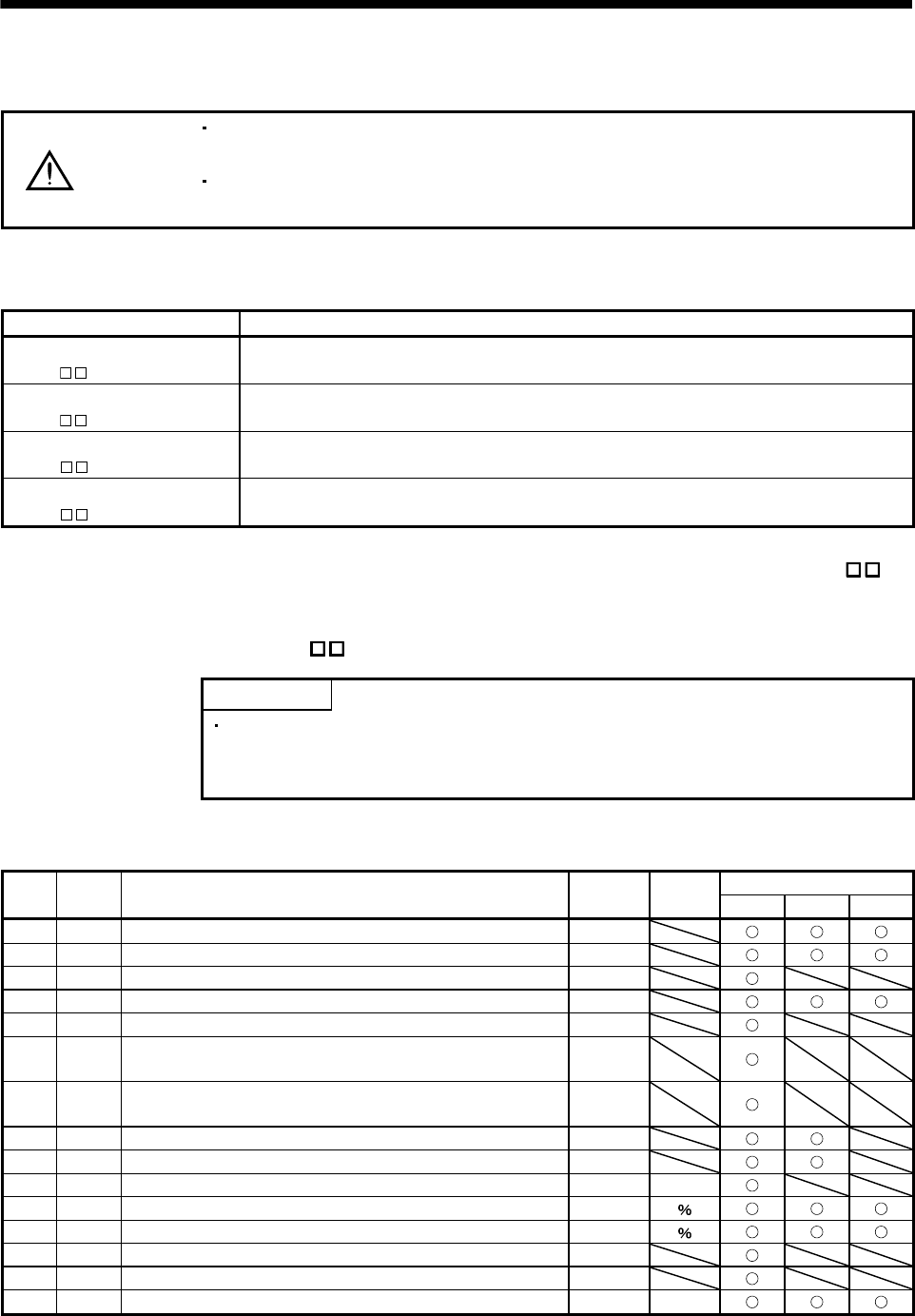
5.1.1 Parameter list
No. Symbol Name Initial value Unit
Control mode
Position Speed Torque
PA01 *STY Control mode 0000h
PA02 *REG Regenerative option 0000h
PA03 *ABS Absolute position detection system 0000h
PA04 *AOP1 Function selection A-1 0000h
PA05 *FBP Number of command input pulses per revolution 0
PA06 CMX
Electronic gear numerator
(Command pulse multiplying factor numerator)
1
PA07 CDV
Electronic gear denominator
(Command pulse multiplying factor denominator)
1
PA08 ATU Auto tuning mode 0001h
PA09 RSP Auto tuning response 12
PA10 INP In-position range 100 pulse
PA11 TLP Forward rotation torque limit 100.0
PA12 TLN Reverse rotation torque limit 100.0
PA13 *PLSS Command pulse input form 0000h
PA14 *POL Rotation direction selection 0
PA15 *ENR Encoder output pulses 4000 pulse/rev