



















14 - 27
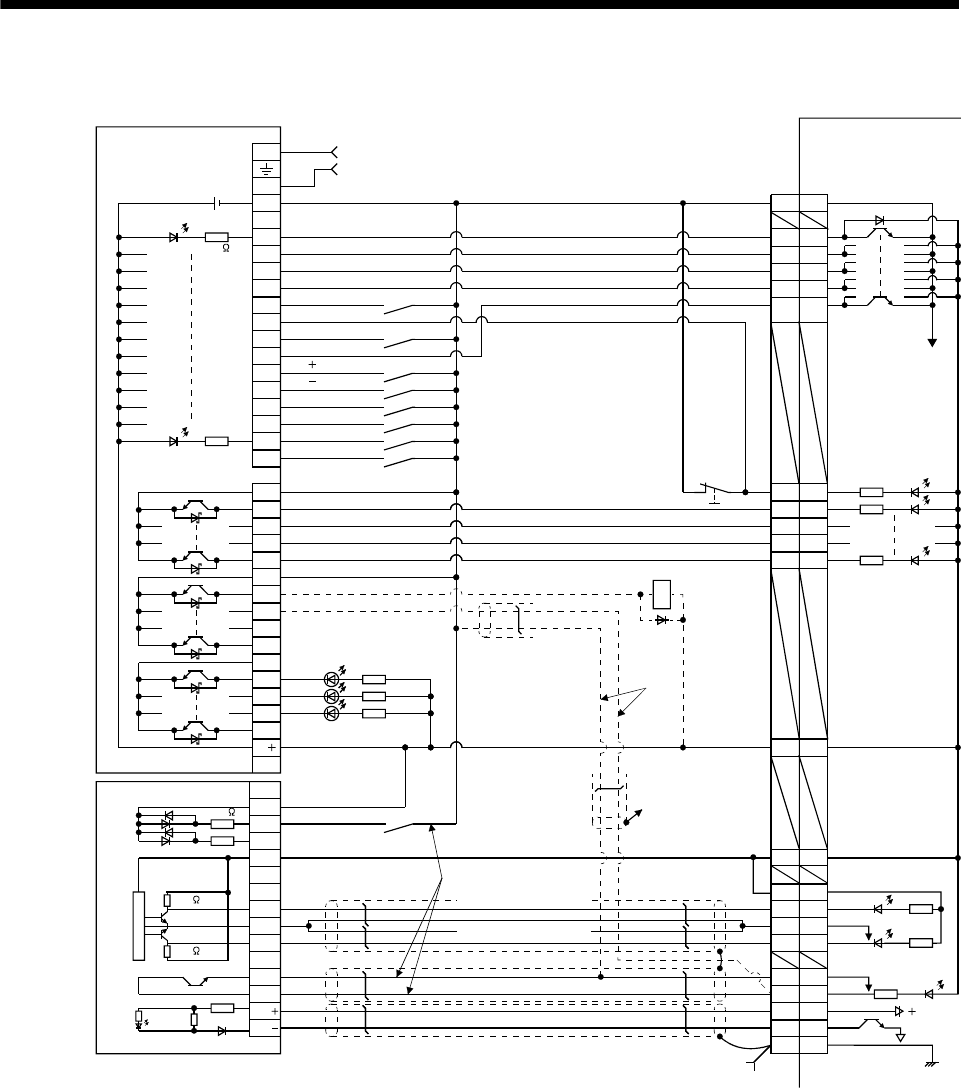
14. ABSOLUTE POSITION DETECTION SYSTEM
(b) FX
2N-32MT (FX2N-1PG)
46
SD
SD
24
3.3k
3.3k
Servo alarm
ABS communication error
ABS checksum error
ABSB0
22
ABSB1
23
ABST
25
ALM 48
RD 49
X0
X1
X2
24VDC
RA2
FX
2N
-32MT
L
N
COM
X3
X4
X5
X6
X7
X10
X11
X12
X15
X13
X14
Power supply
Alarm reset
Emergency stop
Servo-on
JOG( )
JOG( )
Position start
Position stop
Home position return start
1PG error reset
ABS transmission data bit 0/Completion of positioning
ABS transmission data bit 1/Zero speed detection
ABS transmission data ready/Torque limit control speed
Alarm
Servo ready
CN1
Servo amplifier
Y0
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Y10
Y11
Y12
Y13
S/S
DOG
STOP
VIN
FP
COM0
RP
COM1
CLR
PGO
PGO
FX
2N
-1PG
Servo-on
ABS transfer mode
ABS request
Alarm reset
Electromagnetic
brake output
(Note 3)
(Note 2)
EMG 42
SON 15
ABSM
17
ABSR
18
RES 19
DICOM
20
DICOM
21
CR
33
P15R
Plate
DOCOM
OPC 12
PP 10
DOCOM
47
NP 35
OP
47
SD
41
1
Clear
Z-phase pulse
Proximity dog
(Note 1)
COM2
COM3
COM1
3.3k
3.3k
Pulse train for forward rotation
Pulse train for reverse rotation
15V
DOCOM
Note 1. To be connected for the dog type home position setting. At this time, do not connect the portions marked (Note 2).
2. To be connected for the data set type home position setting. At this time, do not connect the portions marked (Note 1).
3. The electromagnetic brake interlock (MBR) should be controlled by connecting the programmable controller output to a
relay.