



















4 - 17
4. STARTUP
4.4.4 Parameter setting
POINT
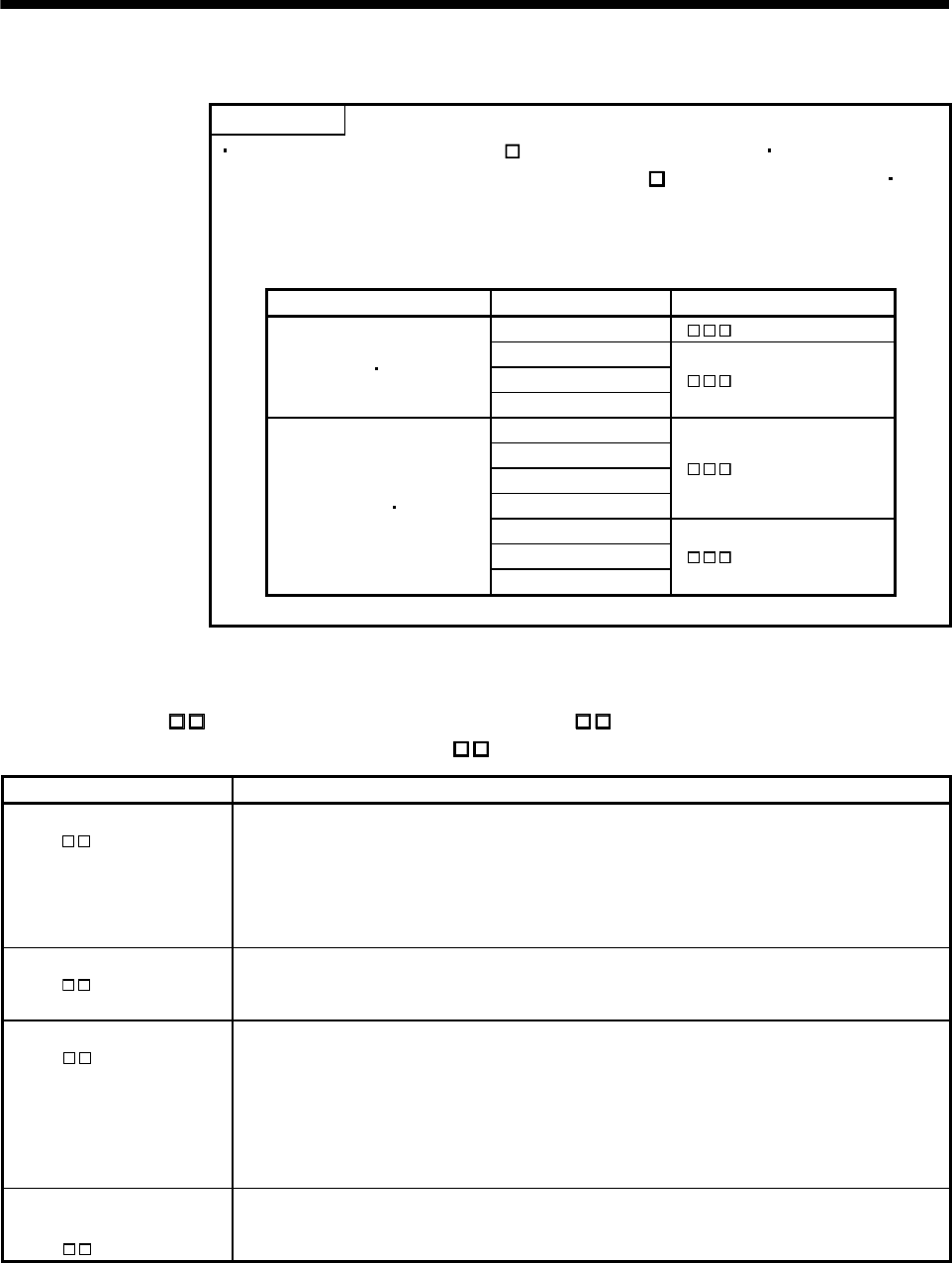
The encoder cable MR-EKCBL M-L/H for the HF-MP series HF-KP series
servo motor or the encoder cable MR-ENECBL
M-H for HF-JP11K1M(4)
15K1M(4) servo motor requires the parameter No.PC22 setting to be changed
depending on its length. Check whether the parameter is set correctly. If it is not
set correctly, the encoder error 1 (At power on) (AL.16) will occur at power-on.
Servo motor Encoder cable Parameter No.PC22 setting
HF-MP series
HF-KP series
MR-EKCBL20M-L/H 0
(initial value)
MR-EKCBL30M-L/H
MR-EKCBL40M-H 1
MR-EKCBL50M-H
MR-ENECBL2M-H
0
(initial value)
MR-ENECBL5M-H
MR-ENECBL10M-H
HF-JP11K1M(4) 15K1M(4) MR-ENECBL20M-H
MR-ENECBL30M-H
MR-ENECBL40M-H 1
MR-ENECBL50M-H
When using this servo in the torque control mode, change the parameter No.PA01 setting to select the torque
control mode. In the torque control mode, the servo can be used by merely changing the basic setting
parameters (No.PA
) and extension setting parameters (No.PC ) mainly.
As necessary, set the I/O setting parameters (No.PD
).
Parameter group Main description
Basic setting parameter
(No.PA
)
Set the basic setting parameters first.
In this parameter group, set the following items.
Control mode selection (select the torque control mode)
Regenerative option selection
Torque limit setting
Encoder output pulse setting
Gain filter parameter
(No.PB
)
If satisfactory operation cannot be achieved by the gain adjustment made by auto tuning, execute in-
depth gain adjustment using this parameter group.
This parameter group must also be set when the gain changing function is used.
Extension setting parameter
(No.PC
)
In this parameter group, set the following items.
Acceleration/deceleration time constant
S-pattern acceleration/deceleration time constant
Internal torque command
Analog torque command maximum speed
Analog torque command offset
In addition, this parameter group must be set when analog monitor output, speed limit, etc. are used.
(Note)
I/O setting parameter
(No.PD
)
Used when changing the I/O devices of the servo amplifier.
Note. The parameter No.PA19 setting must be changed when this parameter group is used.