



















APP - 19
A
PPENDICES
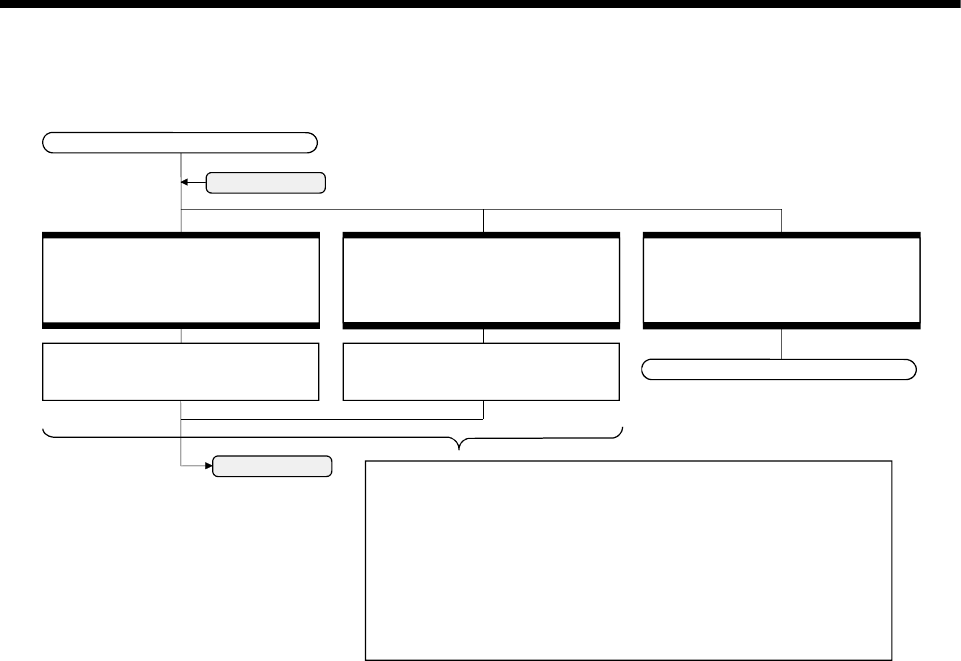
(f) No.140 : Home position return
P0
P0
Home position return request
When PX3 is ON, the home position return request of 1 axis is executed.
When PX4 is ON, the home position return request of 2 axes is executed.
At this time in-position signal ON and start accept OFF confirmed, and home
position return request program is started.
(Note) : This program is the structure which does not have WAIT that it waits for the
completion of the home position return in the next of the motion control
step, because it possible a thing during "K140" practice and "K141" are
started.
(You must take the initial start of each axis to interlock condition to prevent
the double start of K140 and K141.)
[K140 : Real]
1 ZERO
Axis 1
[G140]
//(PX3*!1 axis home position return
//completion *1 axis in-position signal*!1
//axis start accept)?
PX3*!M2410*M2402*!M2001
[K141 : Real]
1 ZERO
Axis 2
[G141]
//(PX4*!2 axes home position return
//completion *2 axes in-position signal*!2
//axis start accept)?
PX4*!M2430*M2422*!M2002
[G142]
//Did you finish home position return
//request mode?
!(PX2*!PX1)
END