



















7 - 72
7 OPERATION CONTROL PROGRAMS
F/FS G
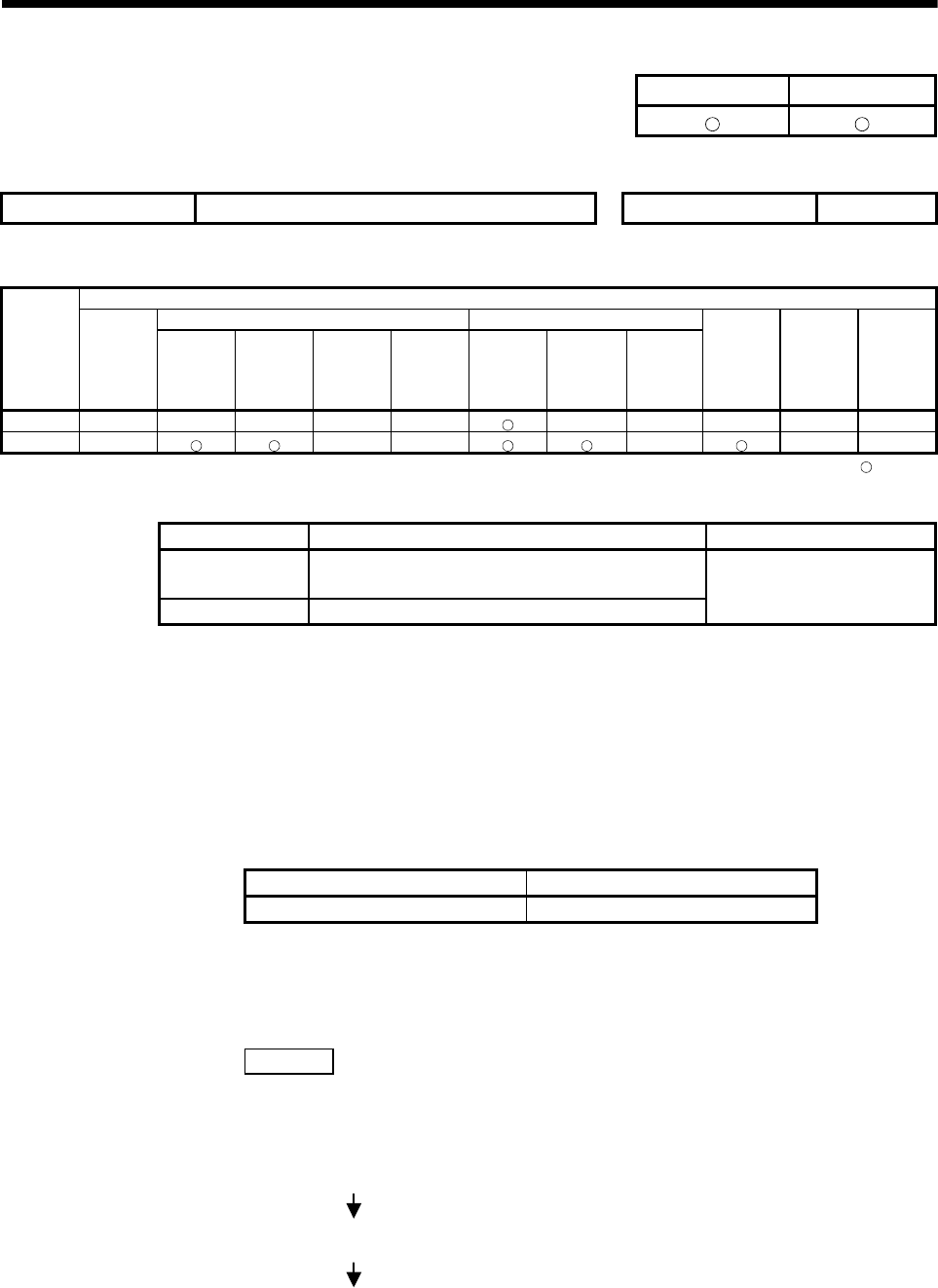
7.12.2 Torque limit value change request : CHGT
Format CHGT((S1), (S2)) Number of basic steps 4
[Usable data]
Usable Data
Word device Constant
Setting
data
Bit device
16-bit
integer
type
32-bit
integer
type (L)
64-bit
floating
point
type (F)
Coasting
timer
16-bit
integer
type (K/H)
32-bit
integer type
(K/H, L)
64-bit
floating
point
type (K)
Calculation
expression
Bit
conditional
expression
Comparison
conditional
expression
(S1) — — — — —
— — — — —
(S2) —
— —
—
— —
: Usable
[Setting data]
Setting data Description Data type of result
(S1)
A
xis No. to which torque limit value change request
will be given
(S2) Specified torque limit value
—
[Functions]
(1) The torque limit value of the axis specified with (S1) is changed to the torque limit
value axis specified with (S2).
(2) In the real mode, any axis that has completed a servo startup can be changed in
torque limit value any time, independently of the status, starting, stopping, servo
ON or servo OFF.
(3) The axis No. that may be set at (S1) is within the following range.
Q172CPU(N) Q173CPU(N)
1 to 8 1 to 32
(4) The torque limit value that may be set at (S2) is within the range 1 to 500[%].
(5) The torque limit value specified here and the one specified in the servo program
have the following relationships.
At start
At a normal start, the torque limit value is given to the servo of the start axis
according to "P. torque" set in the servo program or the "torque limit value" of the
specified parameter block.
For an interpolation start, the torque limit value is given to the number of axes to
be interpolated.
Executing the CHGT instruction gives the preset torque limit value to only the
specified axis.
Thereafter, the torque limit value given to the servo at a servo program start or
JOG start is made valid only when it is lower than the torque limit value specified
in CHGT.
This torque limit value clamp processing is performed per axis.