



















7 - 68
7 OPERATION CONTROL PROGRAMS
(6) By specifying a negative speed and making a speed change request during the
start, allows the axis to start deceleration at that point and return in the opposite
direction upon completion of deceleration.
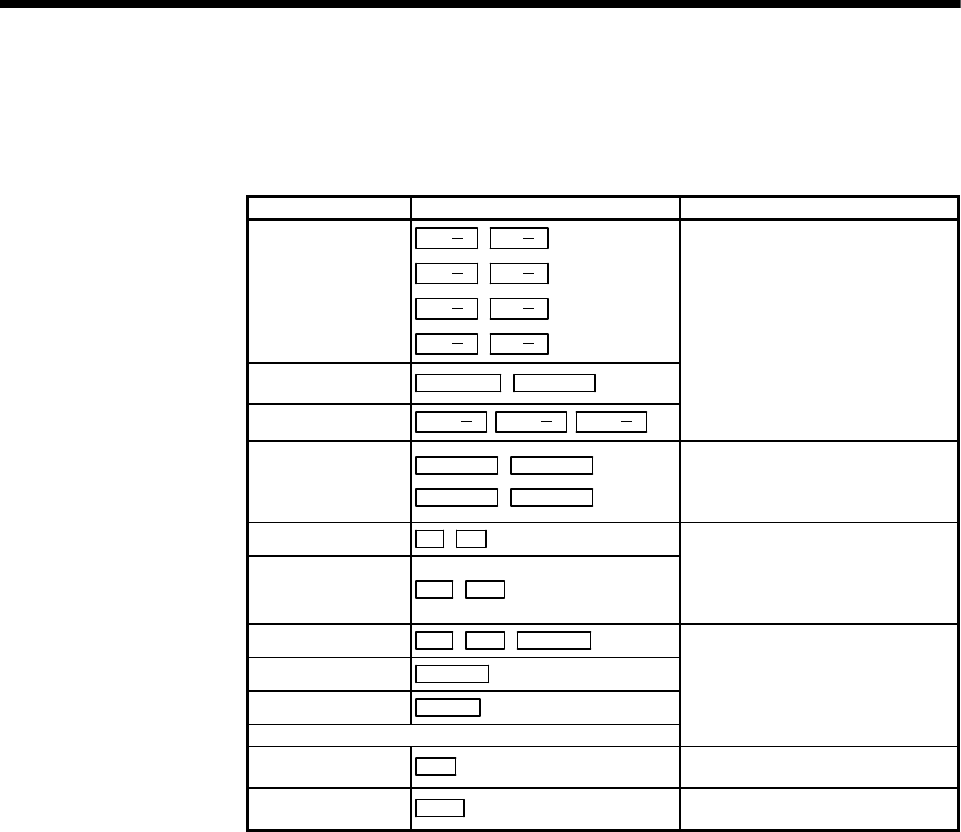
The following operations by the servo instruction are shown below.
Control mode Servo instruction Operation
Linear control
ABS
1 INC 1
ABS
2 INC 2
ABS
3 INC 3
ABS
4 INC 4
Circular interpolation
control
ABS circular
INC circular
Fixed-pitch feed
FEED
1 FEED 2 FEED 3
On completion of deceleration, the axis
reverses its moving direction, returns to the
positioning starting point at the absolute
value of the specified speed, and stops
(waits) there.
For circular interpolation, the axis returns in
the circular path.
Constant-speed control
CPSTART1
CPSTART2
CPSTART3
CPSTART4
On completion of deceleration, the axis
reverses its moving direction, returns to the
preceding point at the absolute value of the
specified speed, and stops (waits) there.
Speed control (I)
VF
VR
Speed control (II)
VVF
VVR
On completion of deceleration, the axis
reverses its moving direction at the absolute
value of the specified speed.
The axis does not stop until a stop instruction
is input.
Speed/position control
VPF
VPR VPSTART
Position follow-up control
PFSTART
Speed switching control
VSTART
JOG operation
The axis cannot return.
The speed change request is regarded as a
normal speed change request.
Minor error [305]
(Note)
will occur and the axis
will be controlled at the speed limit value.
High-speed oscillation
OSC
A speed change cannot be made. Minor
error [310]
(Note)
will occur.
Home position return
ZERO
A speed change cannot be made. Minor
error [301]
(Note)
will occur.
(Note) : Minor error [301] : A speed change was made during home position return.
Minor error [305] : The setting speed is outside the range of 0 to speed limit value.
Minor error [310] : A speed change was made during high-speed oscillation.
[Controls]
(a) If a speed change is made to a negative speed, control is executed with the
control mode during the start as indicated in the above table.
(b) The returning command speed is the absolute value of a new speed.
(c) When the axis is waiting at the return position
1) Signal states (n : Axis No., m : Axis No. –1)
• Start accept (M2000+n) ON
(unchanged from before
execution of CHGV instruction)
• Positioning start completion (M2400+20m) ON
(unchanged from before
execution of CHGV instruction)
• Positioning completion (M2401+20m) OFF
• In-position (M2402+20m) ON
• Command in-position (M2403+20m) OFF
• Speed change "0" accepting flag (M2240+m) ON
2) Make a speed change to a positive speed for a restart.
3) Turn on the stop command to end the positioning.
4) A negative speed change made again will be ignored.