



















5 - 13
5 MOTION DEDICATED PLC INSTRUCTION
[Controls]
(1) This instruction is dedicated instruction toward the Motion CPU in the Multiple
CPU system. Errors occurs when it was executed toward the CPU except the
Motion CPU.
(2) Request to start the servo program specified with (S2).
(3) This instruction is always effective regardless of the state of real mode/virtual
mode/mode switching when the operating system software of Motion CPU is
SV22.
(4) S(P).SFCS/S(P).SVST/S(P).CHGA/S(P).CHGV/S(P).CHGT/S(P).DDRD/
S(P).DDWR cannot be executed simultaneously toward the CPU executing
S(P).SFCS instruction.
When the Motion dedicated PLC instruction is started continuously, It is necessary
to take an inter-lock by the to self CPU high speed interrupt accept flag from
CPUn.
(5) When the servo program is executed also at the motion control step (Kn) in the
Motion CPU, it is necessary to take an inter-lock by user program, because there
is no flag which can distinguish the axis starting in the PLC CPU.
Start accept flag (M2001 to M2032) of the motion devices or positioning start
completion flag (M2400+20n) is used as the inter-lock condition.
(6) It is necessary to take an inter-lock by the start accept flag of the shared CPU
memory so that multiple instructions may not be executed toward the same axis of
the same Motion CPU No..
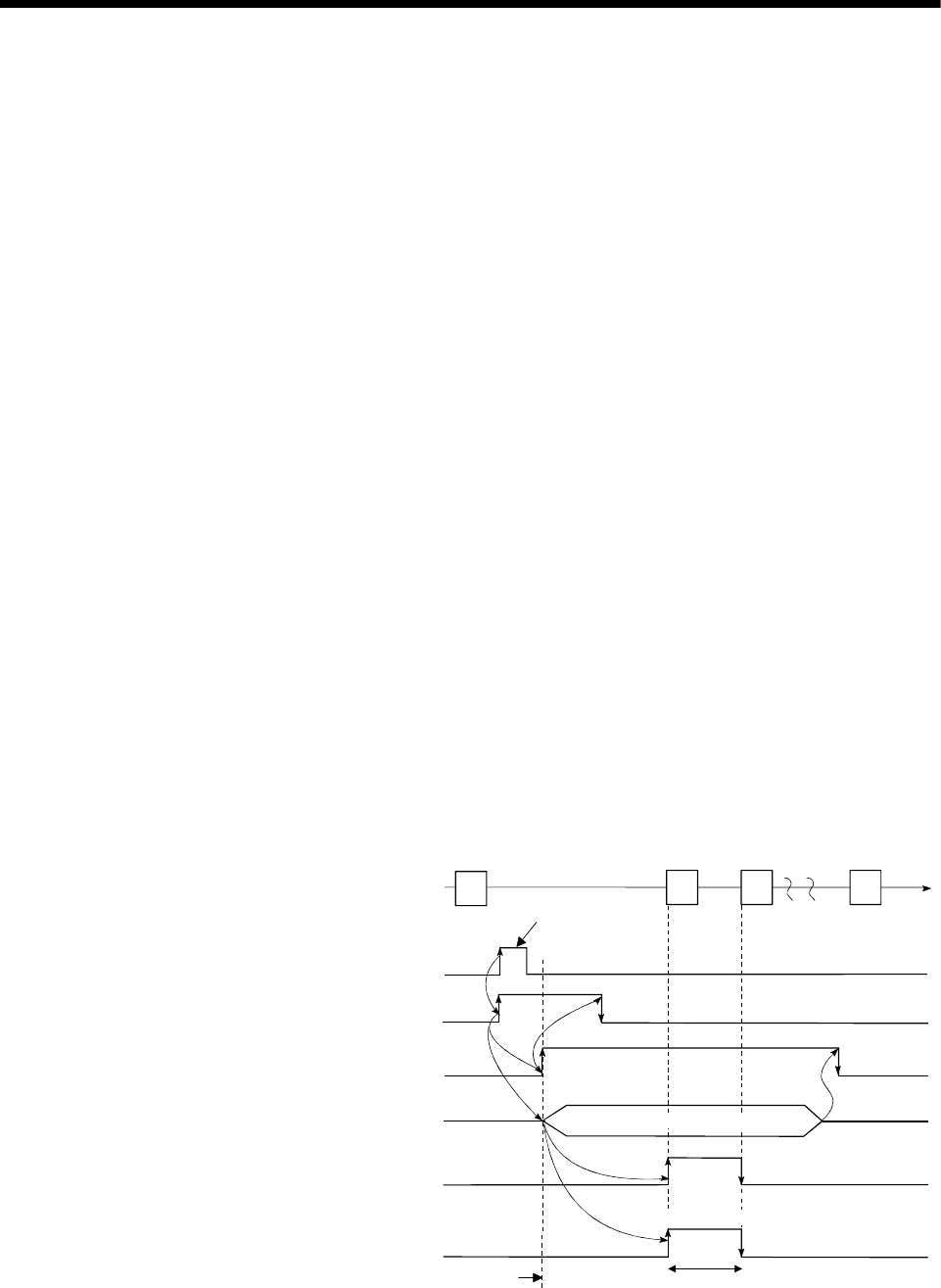
[Operation]
State display device (D1+1)
at the instruction start
accept completion
t
ON
ON
S(P).SVST instruction
OFF
ON
OFF
OFF
OFF
Servo program execution
1 scan
PLC program
Instruction accept
completion at the
Motion CPU side
END
END
END
END
Servo program
S(P).SVST execution
Instruction start
accept complete device
(D1+0)
Start accept flag (axis)
OFF
ON
To self CPU high speed interrupt
accept flag from CPUn
ON : Abnormal completion only
(1) The start accept status of each axis can be confirmed with the start accept flag in
the shared CPU memory of target CPU.