















9 - 17
9 MOTION CONTROL PROGRAMS
9.3 Synchronous Encoder Shaft Current Value Change Control (SV22 only)
The current value of the specified synchronous encoder shaft is
changed in the virtual mode.
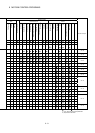
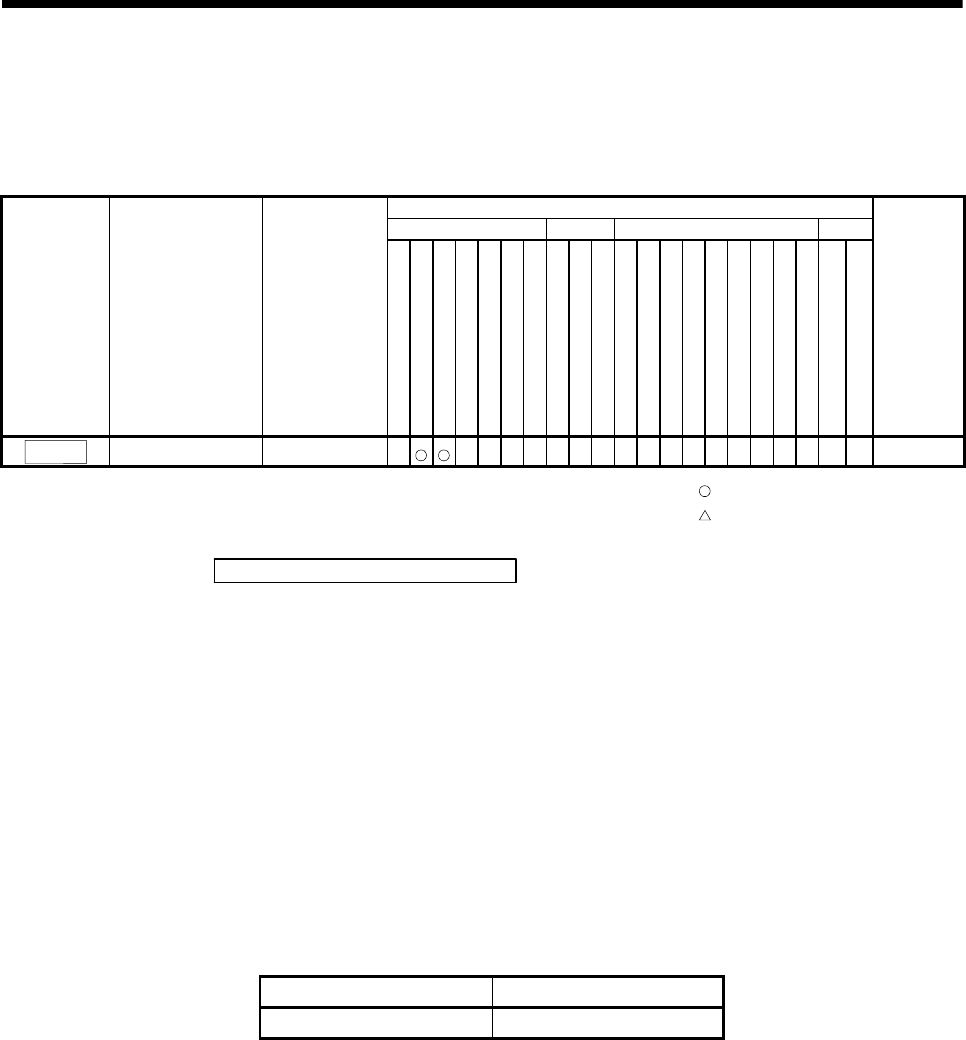
Items set on peripheral device
Common Circular Parameter block Others
Servo
instruction
Positioning
method
Number of
Control axes
Parameter block No.
Axis
Address/travel
Command speed
Dwell time
M-code
Torque limit value
Auxiliary point
Radius
Central point
Control unit
Speed limit value
Acceleration time
Deceleration time
Rapid stop deceleration time
Torque limit value
Deceleration processing
at stop input
Allowable error range for circular
interpolation
S-curve ratio
Cancel
FIN acceleration/deceleration
Speed
change
CHGA-E
Absolute
1 Disable
: Item which must be set
: Item which is set when required
[Controls]
Control using CHGA-E instruction
(1) Executing the CHGA-E instruction changes the current value of the synchronous
encoder shaft in the following procedure.
(a) The synchronous encoder shaft current value changing flag (M2101 to
M2112) corresponding to the specified synchronous encoder shaft is turned
on.
(b) The current value of the specified synchronous encoder shaft is changed to
the specified address.
(c) The synchronous encoder shaft current value changing flag is turned off at
completion of the current value change.
(2) The used axis No. can be set within the following range.
Q172CPU(N) Q173CPU(N)
Axis 1 to 8 Axis 1 to 12
(3) The address which made the current value change by CHGA-E instruction is valid
after also the power supply turned off.