

















4 - 2
4 STRUCTURE OF THE MOTION CPU PROGRAM
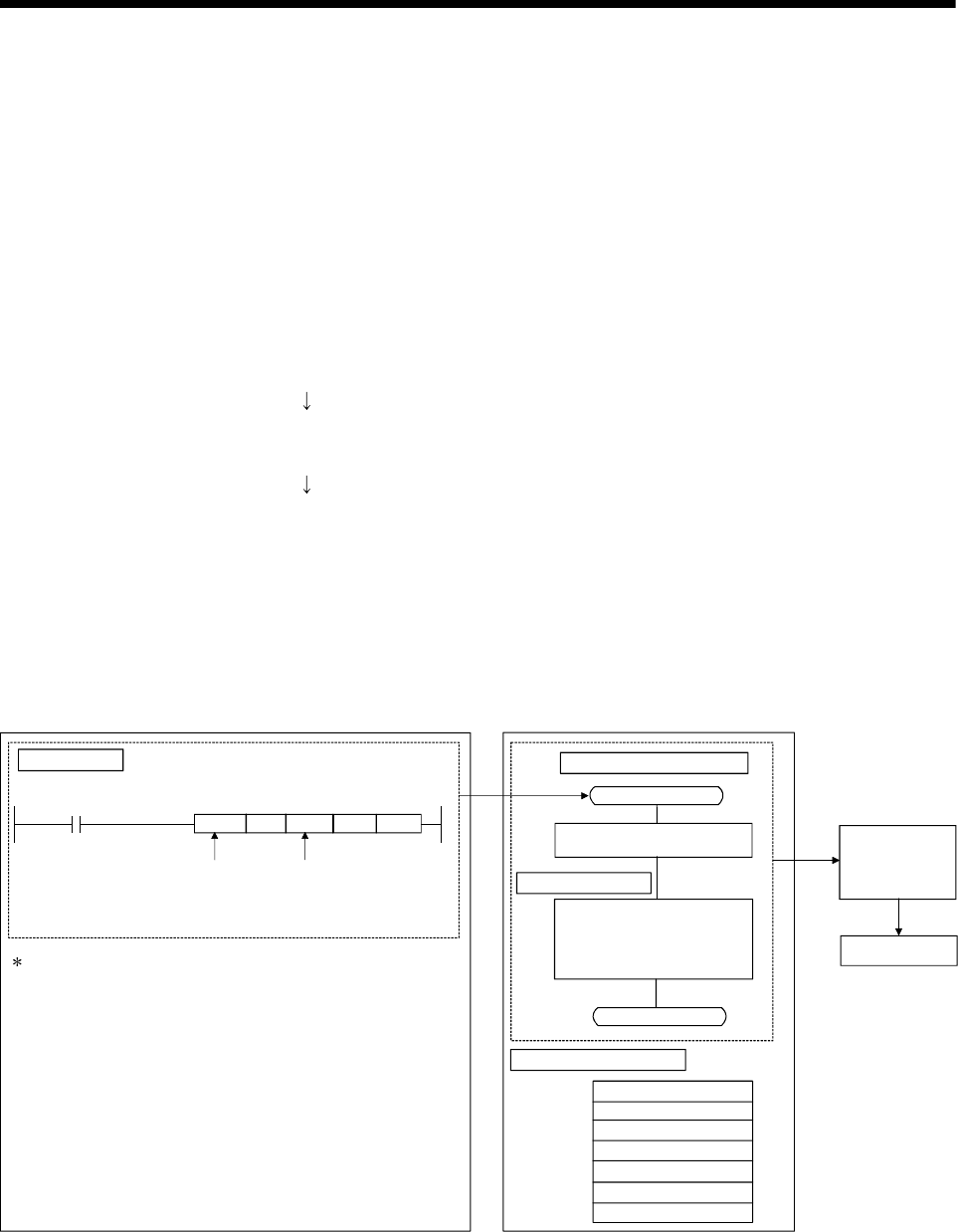
4.1 Motion Control in SV13/SV22 Real Mode
(1) System with servomotor is controlled directly using the servo program in
(SV13/SV22) real mode.
(2) Setting of the positioning parameter and creation of the servo program/ Motion
SFC program are required.
(3) The procedure of positioning control is shown below:
1) Motion SFC program is requested to start using the S(P).SFCS
instruction of the PLC program.
(Motion SFC program can also be started automatically by parameter
setting.)
2) Execute the positioning control using the specified the Motion SFC
program. (Output to the servo amplifier)
3) The servomotor is controlled.
<PLC CPU>
PLC program
SP.SFCS
••••
K0
<Motion CPU>
Motion SFC program
Positioning control parameters
System settings
Fixed parameters
Servo parameters
JOG operation data
Parameter blocks
Home position return data
Limit switch output data
Servo amplifier
Servomotor
: The Motion SFC program can also be started automatically
by parameter setting.
1)
Program structure in SV13/SV22 real mode
2)
3)
Transfer
[G100]
M2049//servo ON received?
[K10: real]
1 INC-2
Axis 1, 10000 PLS
Axis 2, 20000 PLS
Combined speed 30000 PLS/s
END
Servo program
Start request
instruction of
the Motion
SFC program
Specification of starting
program No.
•••• ••••