



















6 - 20
6 MOTION SFC PROGRAMS
6.9.3 Parallel branch, parallel coupling
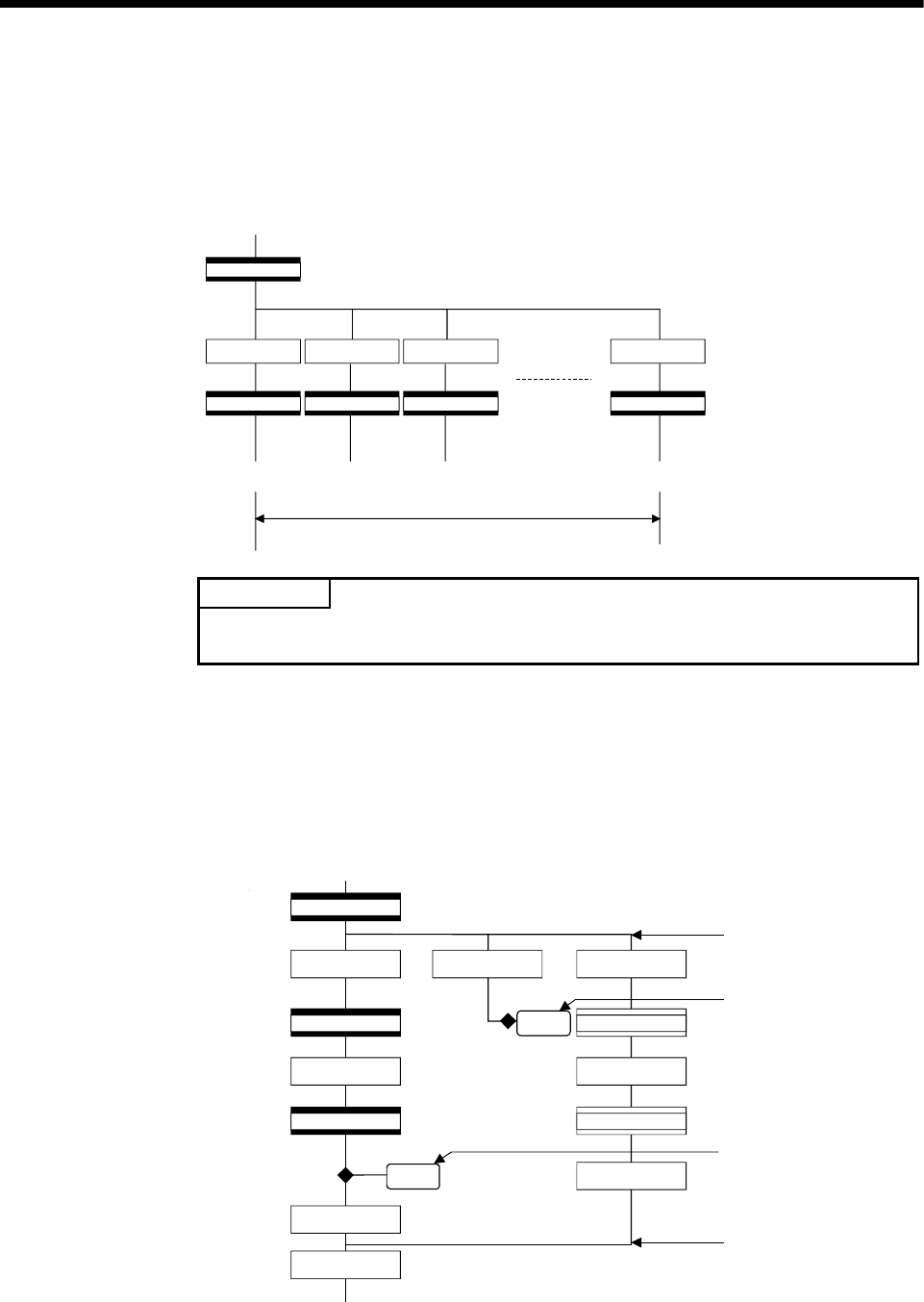
(1) Parallel branch
Multiple routes connected in parallel are executed simultaneously. Each parallel
branch destination may be started by either a step or a transition.
G1 G255
F10K2 K3 F1
Max. number of parallel branches = 255
G1 G2 G3 G255
G1
G0
After operation completion of
preceding step, steps K2 to
F10 connected in parallel are
executed when the completion
of condition set at transition
G0. Thereafter, routes are
executed simultaneously up to
parallel coupling point.
POINT
"Shift" or "WAIT" can be set to a transition preceding a parallel branch.
"WAITON" and "WAITOFF" cannot be set.
(2) Parallel coupling
A parallel branch must be coupled by a parallel coupling. A jump setting to
another branch route can be made within parallel branch-parallel coupling.
In this case, a jump destination is a midway parallel coupling point (coupling
jump).
You cannot set a jump to exit from within parallel branch-parallel coupling.
PAB1
PAE1
G1
K2
ON M100
K3
G3
K100
K5
K4 F10
G11
F11
G12
F12
Parallel branch point
Coupling jump
Parallel coupling point
After the servo program K3 has
completed stopping, execution waits
until the completion of condition set
at transition G3 and servo program
K4 completes starting.
On completion of waiting, execution
transits to the next (lower part).