


















1 - 6
1 OVERVIEW
1.2.2 Basic specifications of Q173CPU(N)/Q172CPU(N)
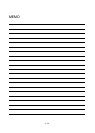
(1) Module specifications
Item Q173CPUN Q173CPUN-T Q173CPU Q172CPUN Q172CPUN-T Q172CPU
Teaching unit —— Usable —— —— Usable ——
Internal current
consumption(5VDC) [A]
1.25 1.56
(Note)
1.75 1.14 1.45
(Note)
1.62
Mass [kg] 0.23 0.24 0.22 0.22 0.23 0.21
Exterior dimensions
[mm(inch)]
98(3.86)(H) 27.4(1.08)(W)
114.3(4.50)(D)
118(4.65)(H)
27.4(1.08)(W)
89.3(3.52)(D)
98(3.86)(H)
27.4(1.08)(W)
114.3(4.50)(D)
118(4.65)(H)
27.4(1.08)(W)
89.3(3.52)(D)
(Note) : Current consumption 0.26[A] of the teaching unit is included.
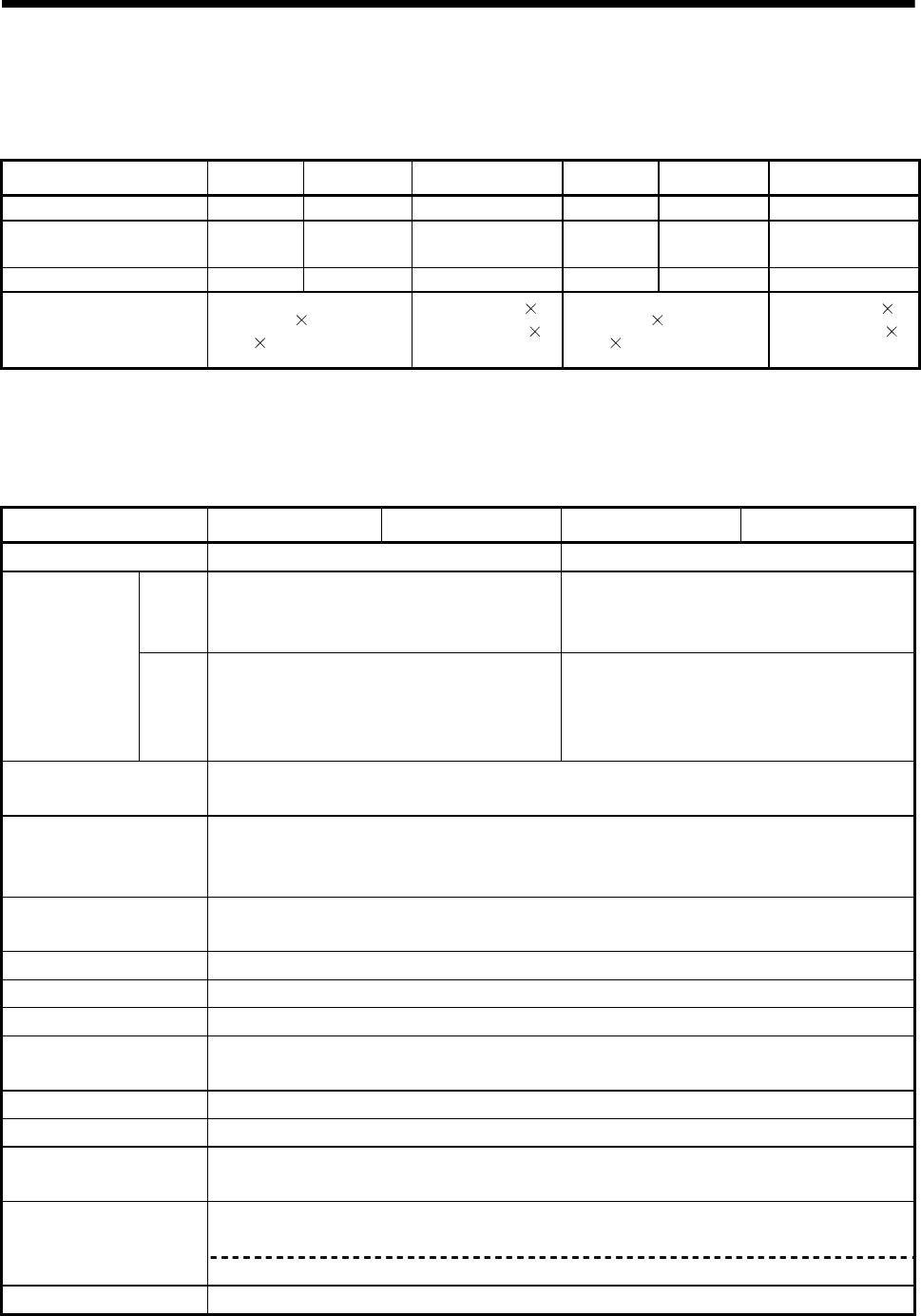
(2) SV13/SV22 Motion control specifications/performance
specifications
(a) Motion control specifications
Item Q173CPUN(-T) Q173CPU Q172CPUN(-T) Q172CPU
Number of control axes Up to 32 axes Up to 8 axes
SV13
0.88ms/ 1 to 8 axes
1.77ms/ 9 to 16 axes
3.55ms/17 to 32 axes
0.88ms/1 to 8 axes
Operation cycle
(default)
SV22
0.88ms/ 1 to 4 axes
1.77ms/ 5 to 12 axes
3.55ms/13 to 24 axes
7.11ms/25 to 32 axes
0.88ms/1 to 4 axes
1.77ms/5 to 8 axes
Interpolation functions
Linear interpolation (Up to 4 axes), Circular interpolation (2 axes),
Helical interpolation (3 axes)
Control modes
PTP(Point to Point) control, Speed control, Speed-position control, Fixed-pitch feed,
Constant speed control, Position follow-up control, Speed switching control,
High-speed oscillation control, Synchronous control (SV22)
Acceleration/
deceleration control
Automatic trapezoidal acceleration/deceleration,
S-curve acceleration/deceleration
Compensation Backlash compensation, Electronic gear
Programming language Motion SFC, Dedicated instruction, Mechanical support language (SV22)
Servo program capacity 14k steps
Number of positioning
points
3200 points
(Positioning data can be designated indirectly)
Programming tool IBM PC/AT
Peripheral I/F USB/RS-232/SSCNET
Teaching operation
function
Provided (Q173CPUN-T/Q172CPUN-T, SV13 use)
Proximity dog type (2 types), Count type (3 types), Data set type (2 types), Dog cradle type,
Stopper type (2 types), Limit switch combined type
Home position return
function
(Home position return re-try function provided, home position shift function provided)
JOG operation function Provided