



















APP - 17
A
PPENDICES
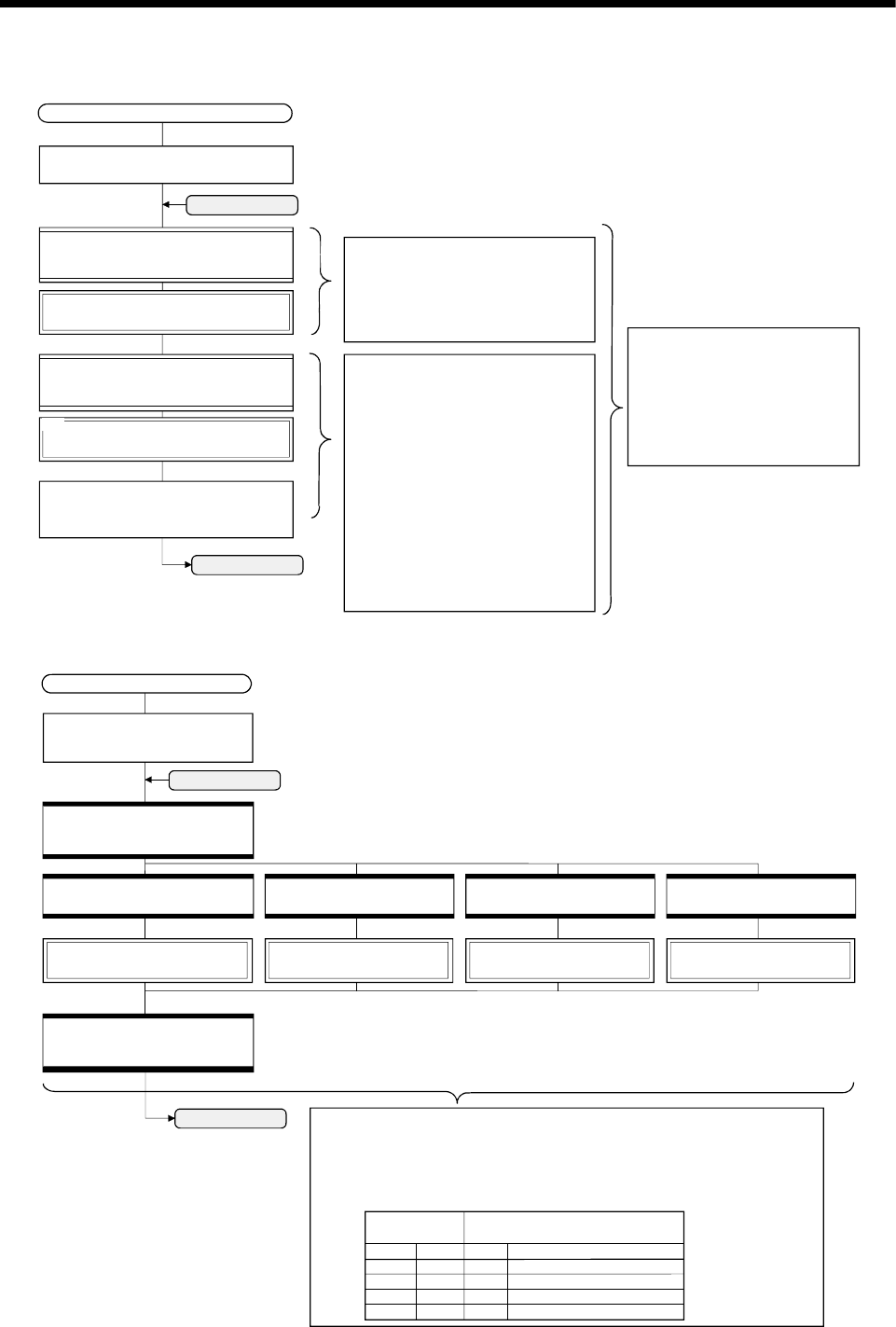
(b) No.20 : Main
P0
P0
When a forced stop is released, a
subroutine starts "No.110 : Motion
control". (Because the next step is a
shift, it becomes a subroutine start, and
the next step is executed at the same
time with subroutine practice, too.)
Main
[F20]
SET M9028 //Clock data read request ON
[F25]
DOUT PY10,H0000 //PY10 to PY1F
(16points)OFF
[G20]
M9076 //Did you during the forced
//stop?
Motion control
[G21]
!M9076 //Did you release the
//forced stop?
Motion control
CLR
When a forced stop is released, it is
the structure which starts the program
which does motion control from the
initials again by sample program.
Therefore it is the system example
that motion control is resumed when
a forced stop release is executed
after it stops forced for while.
"No.110 : Motion control" is made to
stop at the time of the forced stop,
and (The program that a subroutine call
is executed from No.110 stops, too.)
actual output (PY) is turned off.
(Note-1) : The program that a subroutine
was started is made to stop if
necessary when a subroutine
start program is added
because it does not stop.
(Note-2) : Real output is turned off if
necessary.
(Note-3) : The occurrence detection of
servo error and so on is added
to the stop status with forced
stop if necessary.
(c) No.110 : Motion control
P0
P0
Motion control
[F110]
SET M2042 //All axes servo ON
//command ON
The subroutine call of the following program is executed corresponding to the status of
PX1, PX2.
Selective branch is made the program so that each subroutine may never start it in the
plural at the same time.
And, each subroutine makes the next step "WAIT" to become a subroutine call to
make it stop when this program is suspended by the clear step of "No.20 : Main", too.
JOG
[G105]
M2415*M2435 //Is 1 axis and
//2 axis servo on/off status ON?
[G110]
!PX2*!PX1
Manual pulse generator
[G111]
!PX2*PX1
Home position return
[G112]
PX2*!PX1
Programming operation
[G113]
PX2*PX1
[G115]
//Wait a subroutine call completion
NOP
Program name
JOG
Manual pulse generator
Home position return
Programming operation
Condition of
PX1, PX2
PX2
OFF
OFF
ON
ON
PX1
OFF
ON
OFF
ON
No.
120
130
140
150
Subroutine call program