



















Chapter 5. Problem Determination, Diagnostics, and Recovery 377
1st ed., 6/30/04 - 312579601
Diagnostic Commands
VM (CP) Commands
The CP commands listed in “VM (CP) Debug Commands” on page 349 are very useful in
diagnosing a problem. For maximum effectiveness, they should be used in conjunction
with the SCP’s diagnostic subsystem commands.
SCP Debug Mode
The SCP may operate in a special ‘‘debug’’ mode, initiated by some of the commands of
the SCP diagnostic subsystem.
The debug mode is special in the following ways:
• When entering debug mode, the SCP issues the CP command SET RUN OFF. After
this, when the virtual machine enters a CP READ state, the virtual machine stops and
does not proceed until a CP BEGIN command is issued.
• A flag is set in the CVT to indicate that debug mode is active.
• If the SCP command STOPSCP is issued, control will return to CMS without a
re-IPL.
• Debug mode is terminated by the diagnostic command ‘=NODEBUG’.
Setting Initialization Sequence Break-Points
Sometimes, it is useful to setup program break-points that would be reached before the
command interface is enabled.
After the ACS EXEC loads the program modules into storage, the locations of the
break-points will be determined, and the CP PER command will be used to set stops for
those locations. After all break-points have been set, the CP QUERY PER command is
issued to display what has been set. When the SCP is initialized, it will be in the special
‘‘debug’’ mode.
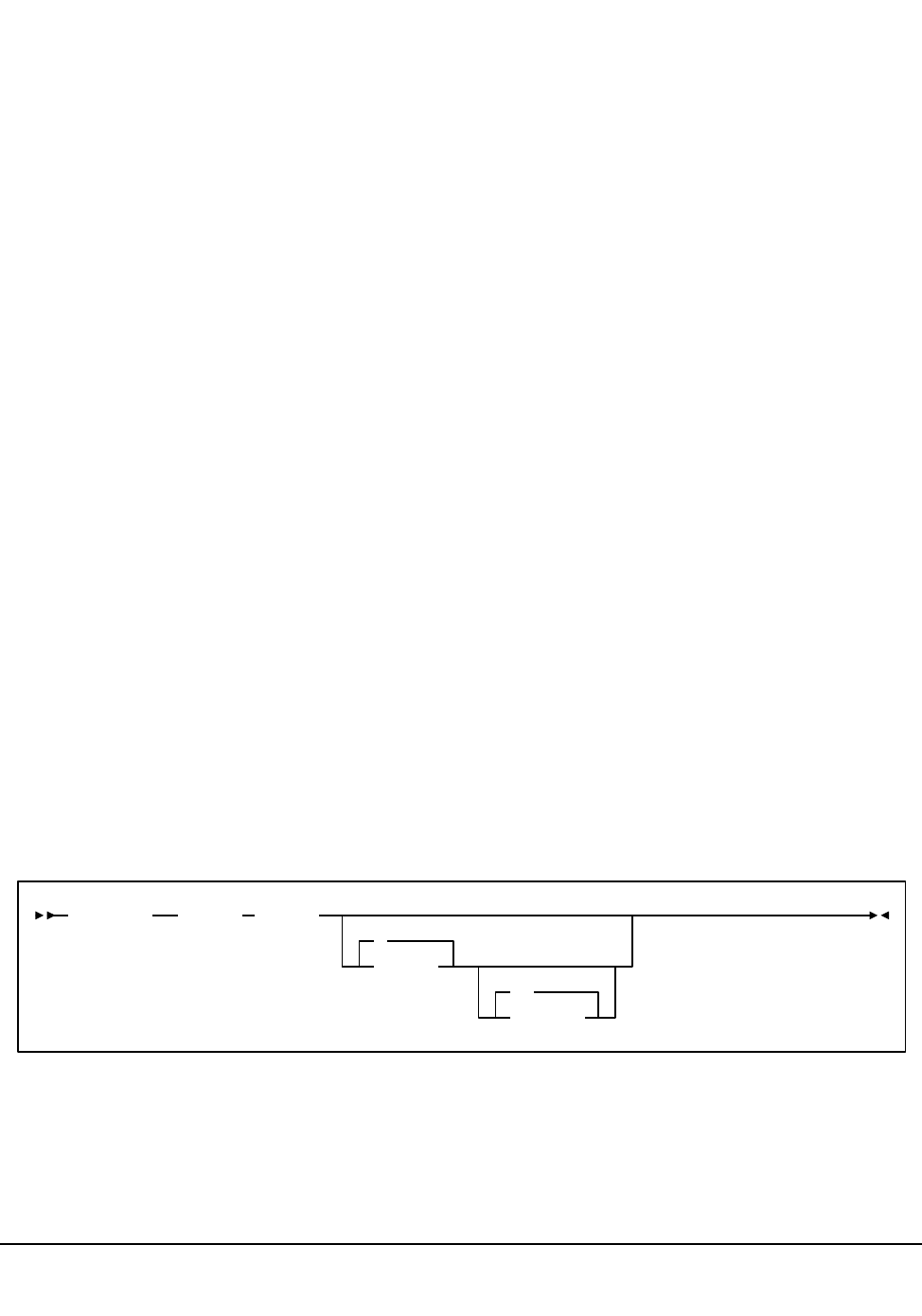
To set such break-points, start the SCP with the following command:
epname
the name of a known entry point. It is either named in the map within any
SLKNUCxx module or there is a CDE structure for the name.
ACS INIT (BREAK epname
0
offset
.1
.length