


















16 - 20
Chapter 16 Troubleshooting
Classification
of errors
Error
code
Error name Error Operation status at error occurrence
Home
position
return (OPR)
212
ABS reference point
read error
The data is not loaded from the servo
amplifier properly upon the OPR.
The OPR does not complete.
230
Encoder ABS data not
established
OPR is started on the direct drive motor
when the absolute position data of the
encoder has not been established.
The OPR does not start.
231
Z-phase passing
parameter invalid
Servo parameter "Function selection C-4
(PC17)" is not set to "0: Need to pass servo
motor Z-phase after power on" in the
machine OPR of scale origin signal
detection method.
The OPR does not start.
JOG
operation or
inching
operation
errors
300
Outside JOG speed
range
At the time of JOG starting, the JOG speed
comes out of a specified range.
The JOG operation is not carried out when
the JOG speed is outside the setting range at
the time of JOG start.
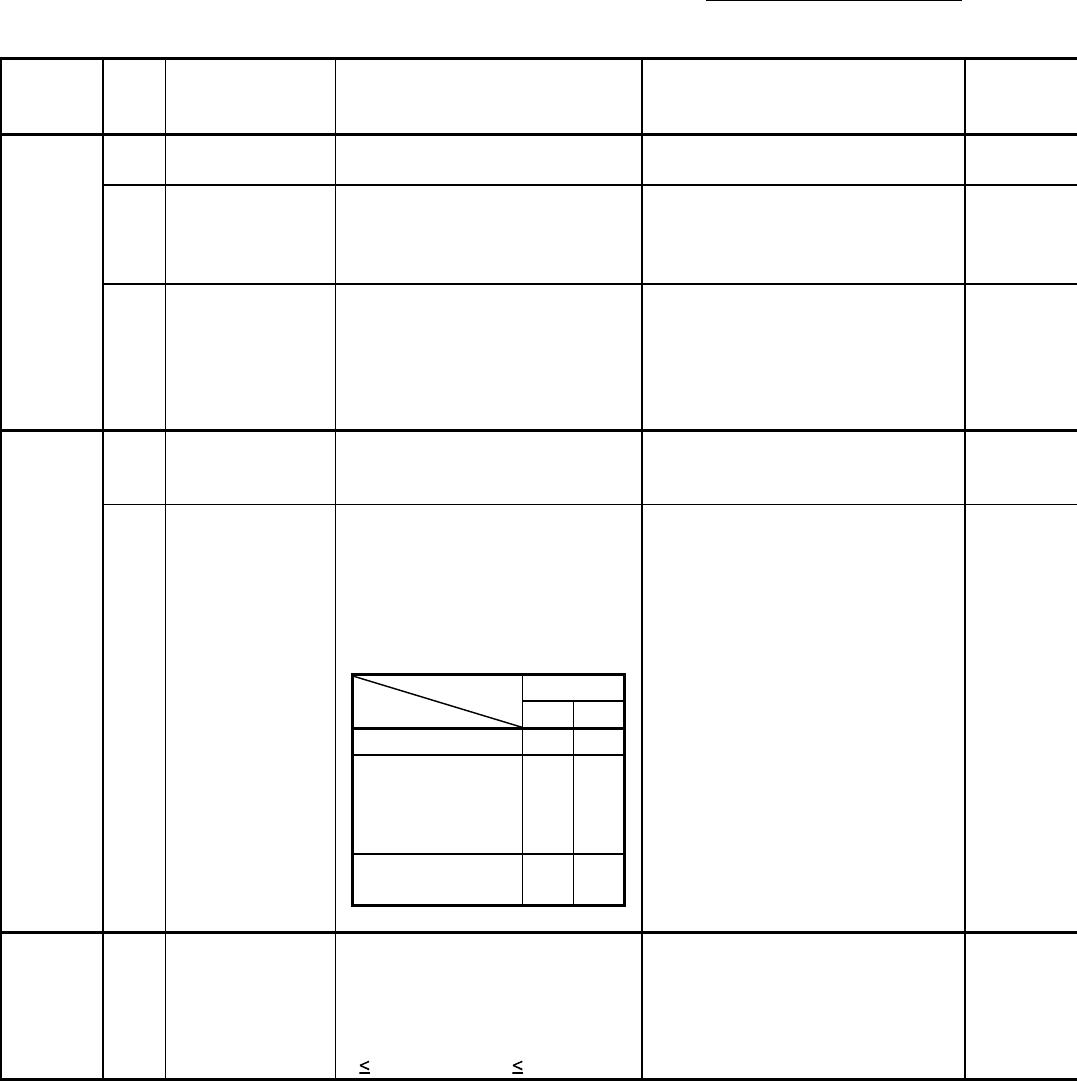
301
Inching movement
amount error
The inching movement amount dose not
satisfy the setting conditions. (The setting
value is large.)
Setting condition:
"Inching movement amount × (A) ≤ JOG
speed limit value"
Use the following values for (A).
The inching operation is not carried out when
the inching movement amount exceeds a
JOG speed limit at the time of inching start.
Operation cycle
0.88 1.77
When unit is set to PLS 1125 562.5
When unit is set to degree
and "[Pr.83] Speed control
10 x multiplier setting for
degree axis" is valid
67.5 33.75
When unit setting is other
than the above
675 337.5
Positioning
operation
errors
500
Illegal condition data
No.
The condition data No. is outside the
setting range when a block using the
condition data is started by a special
starting (conditional start, wait start,
simultaneous start, FOR (condition)).
(1
Condition data No. 10)
The operation is terminated.