



















5 - 62
Chapter 5 Data Used for Positioning Control
[Pr.52] OPR deceleration time selection
Set which of "deceleration time 0 to 3" to use for the deceleration time during OPR.
0 : Use the value set in "[Pr.10] Deceleration time 0".
1 : Use the value set in "[Pr.28] Deceleration time 1".
2 : Use the value set in "[Pr.29] Deceleration time 2".
3 : Use the value set in "[Pr.30] Deceleration time 3".
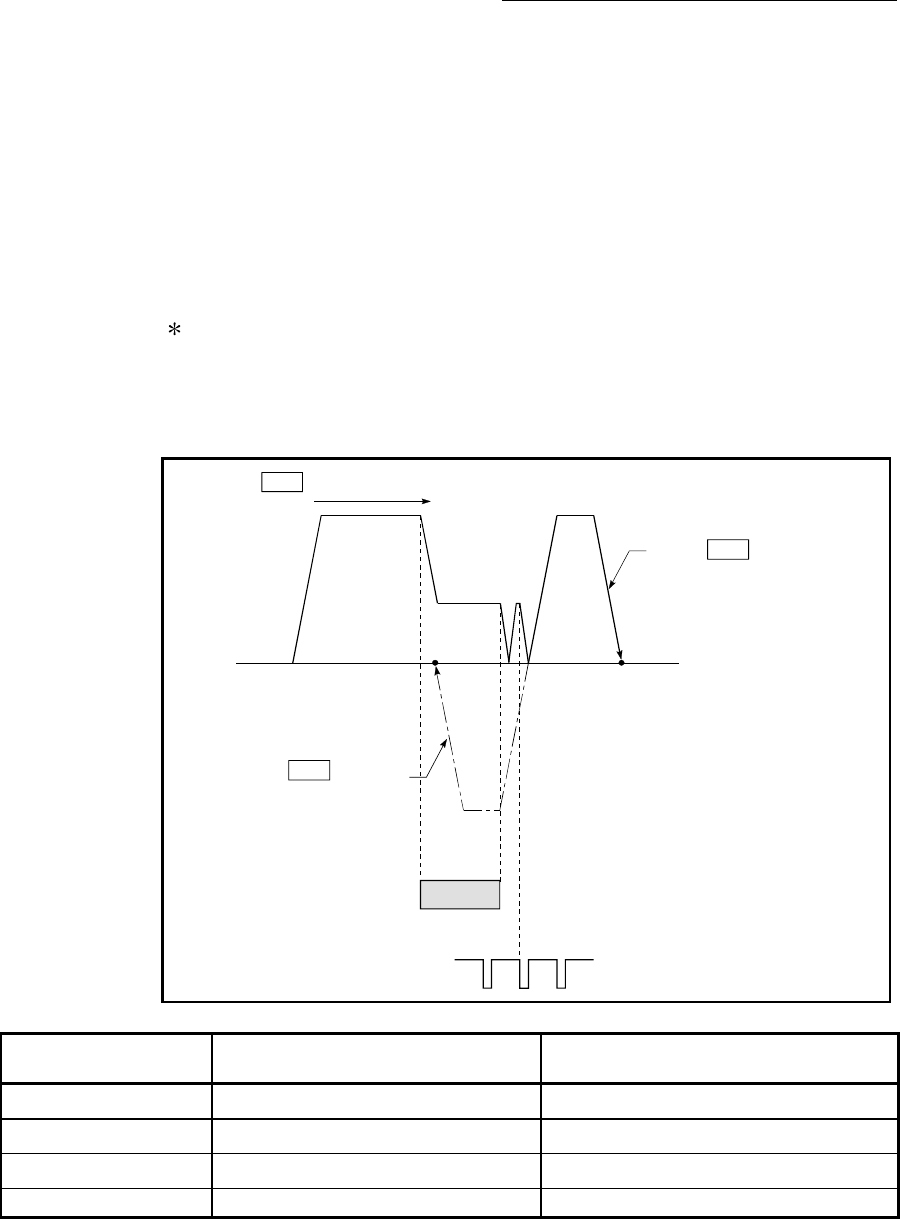
[Pr.53] OP shift amount
Set the amount to shift (move) from the position stopped at with machine OPR.
The OP shift function is used to compensate the OP position stopped at with
machine OPR.
If there is a physical limit to the OP position, due to the relation of the near-point
dog installation position, use this function to compensate the OP to an optimum
position.
OPR direction
When " OP
shift amount" is positive
Shift point
Shift point
When " OP
shift amount" is negative
Start point
Near-point dog signal
Zero signal
Pr.53
Pr.53
Pr.44
[Pr.1] setting value
Value set with GX Works2
(unit)
Value set with sequence program
(unit)
0 : mm
-214748364.8 to 214748364.7 (
m)
-2147483648 to 2147483647 (
10
-1
m)
1 : inch -21474.83648 to 21474.83647 (inch)
-2147483648 to 2147483647 (
10
-5
inch)
2 : degree -21474.83648 to 21474.83647 (degree)
-2147483648 to 2147483647 (
10
-5
degree)
3 : PLS -2147483648 to 2147483647 (PLS) -2147483648 to 2147483647 (PLS)