



















12 - 23
Chapter 12 Expansion Control
[3] Speed control mode
Operation for speed control mode
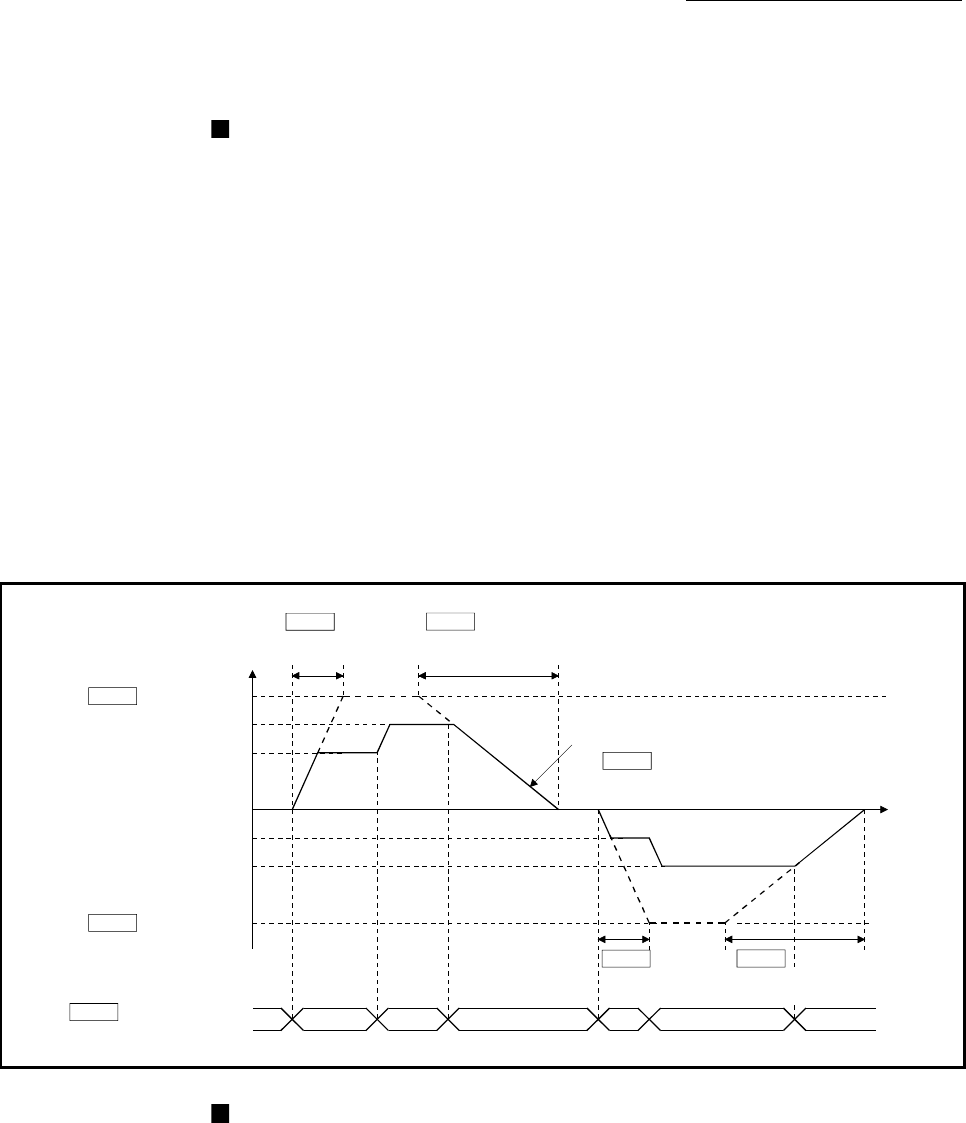
The speed control is executed at the speed set in "[Cd.140] Command speed at
speed control mode" in the speed control mode. Set a positive value for forward
rotation and a negative value for reverse rotation. "[Cd.140]" can be changed any
time during the speed control mode.
Acceleration/deceleration is performed based on a trapezoidal
acceleration/deceleration processing. Set acceleration/deceleration time toward
"[Pr.8] Speed limit value" in "[Cd.141] Acceleration time at speed control mode"
and "[Cd.142] Deceleration time at speed control mode". The value at speed
control mode switching request is valid for "[Cd.141]" and "[Cd.142]".
The command speed during the speed control mode is limited with "[Pr.8] Speed
limit value". If the speed exceeding the speed limit value is set, the warning
"Speed limit value over" (warning code: 501) occurs, and the operation is
controlled with the speed limit value.
Confirm the command speed to servo amplifier with "[Md.122] Speed during
command".
Cd.142
Deceleration time at
speed control mode
0
t
V
0
20000 30000 -10000 -200000 0
Pr.8 Speed limit value
30000
20000
-10000
-20000
Pr.8 Speed limit value
Md.122
The command speed to servo amplifier is stored
in " Speed during command".
Cd.141
Acceleration time at
speed control mode
Cd.140
Command speed at
s
p
eed control mode
Cd.141
Acceleration time at
speed control mode
Cd.142
Deceleration time at
speed control mode
Current feed value during speed control mode
"[Md.20] Current feed value", "[Md.21] Machine feed value" and "[Md.101] Real
current value" are updated even in the speed control mode.
If the current feed value exceeds the software stroke limit, the error "Software
stroke limit +" (error code: 507) or "Software stroke limit -" (error code: 508) occurs,
and the operation switches to the position control mode. Invalidate the software
stroke limit to execute one-way feed.