


















5 - 3
Chapter 5 Data Used for Positioning Control
The following methods are available for data setting:
• Set using GX Works2.
• Create the sequence program for data setting using GX Works2 and execute it.
In this manual, the method using the GX Works2 will be explained.
(Refer to "POINT" on the next page.)
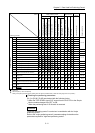
The basic parameters 1, detailed parameters 1, OPR parameters, "[Pr.83] Speed
control 10 x multiplier setting for degree axis", "[Pr.89] Manual pulse
generator/Incremental synchronous encoder input type selection", "[Pr.90]
Operation setting for speed-torque control mode" and "[Pr.95] External command
signal selection" become valid when the PLC READY signal [Y0] turns from OFF to
ON.
The basic parameters 2, detailed parameters 2 (Note that this excludes "[Pr.83]
Speed control 10 x multiplier setting for degree axis", "[Pr.89] Manual pulse
generator/Incremental synchronous encoder input type selection", "[Pr.90]
Operation setting for speed-torque control mode" and "[Pr.95] External command
signal selection".) become valid immediately when they are written to the buffer
memory, regardless of the state of the PLC READY signal [Y0].
Even when the PLC READY signal [Y0] is ON, the values or contents of the
following can be changed: basic parameters 2, detailed parameters 2, positioning
data, and block start data.
The expansion parameter and servo parameter is transmitted from the Simple
Motion module to the servo amplifier when the initialized communication carried out
after the power supply is turned ON or the PLC CPU is reset.
The power supply is turned ON or the PLC CPU is reset after writing servo
parameter in flash ROM of Simple Motion module if the servo parameter is
transmitted to the servo amplifier.
The following servo parameter in the buffer memory is transmitted to the servo
amplifier when the PLC READY [Y0] turns from OFF to ON.
• "Auto tuning mode (PA08)"
• "Auto tuning response (PA09)"
• "Feed forward gain (PB04)"
• "Load to motor inertia ratio/load to motor mass ratio (PB06)"
• "Model loop gain (PB07)"
• "Position loop gain (PB08)"
• "Speed loop gain (PB09)"
• "Speed integral compensation (PB10)"
• "Speed differential compensation (PB11)"
The only valid data assigned to basic parameter 2, detailed parameter 2,
positioning data or block start data are the data read at the moment when a
positioning or JOG operation is started. Once the operation has started, any
modification to the data is ignored.
Exceptionally, however, modifications to the following are valid even when they are
made during a positioning operation: acceleration time 0 to 3, deceleration time 0
to 3, and external command function.
• Acceleration time 0 to 3 and deceleration time 0 to 3:
Positioning data are pre-read and pre-analyzed. Modifications to the
data four or more steps after the current step are valid.
• External command function selection: The value at the time of detection is valid.