



















8 - 10
Chapter 8 OPR Control
Precautions during operation
(1) The error "Count method movement amount fault "(error code: 206) will occur
if the "[Pr.50] Setting for the movement amount after near-point dog ON" is
smaller than the deceleration distance from the "[Pr.46] OPR speed" to
"[Pr.47] Creep speed".
(2) If the speed is changed to a speed faster than "[Pr.46] OPR speed" by the
speed change function (refer to "13.5.1 Speed change function".) during a
machine OPR, the distance to decelerate to "[Pr.47] Creep speed" may not be
ensured, depending on the setting value of "[Pr.50] Setting for the movement
amount after near-point dog ON". In this case, the error "Count method
movement amount fault" (error code: 206) occurs and the machine OPR is
stopped.
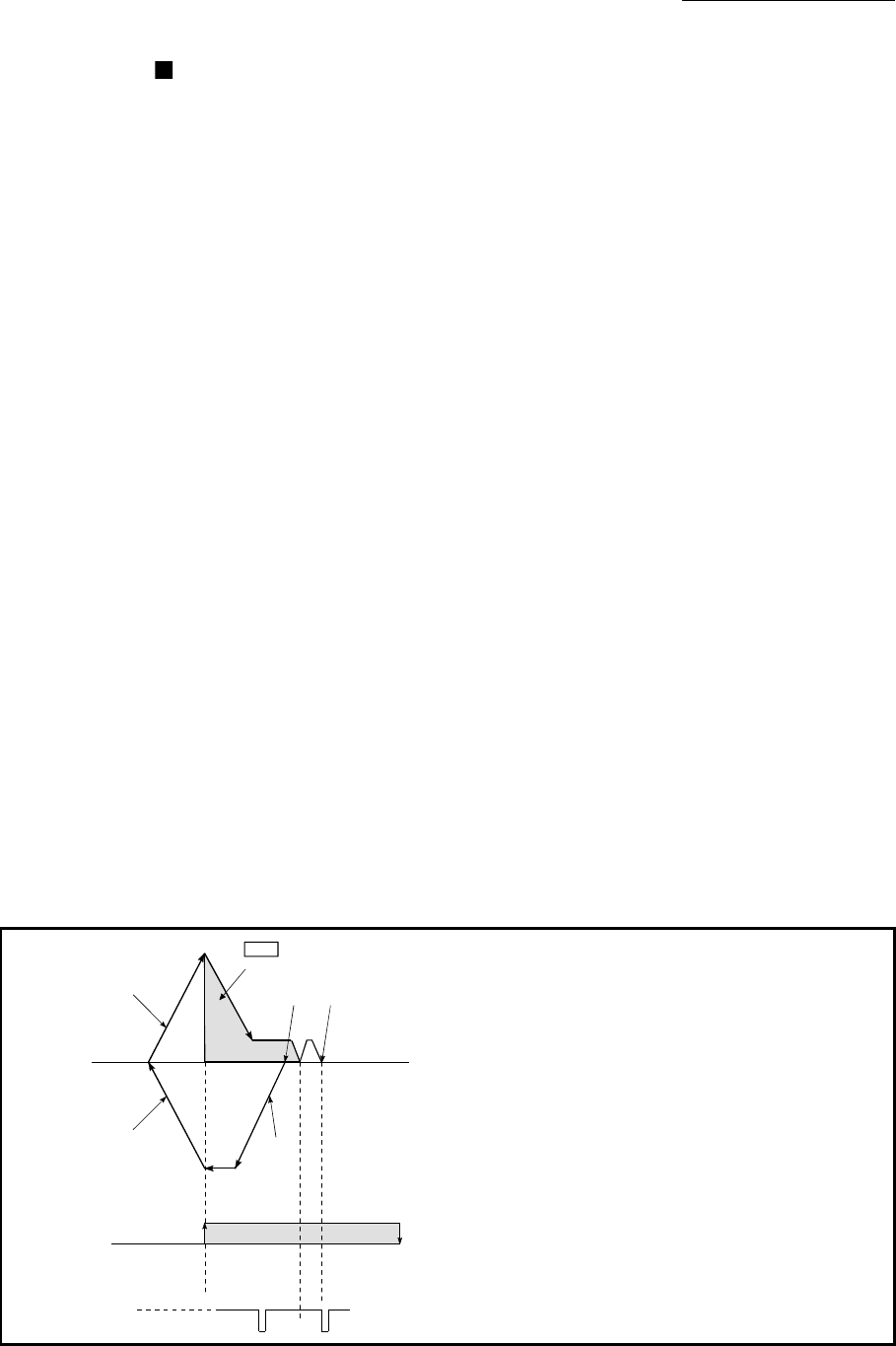
(3) The following shows the operation when a machine OPR is started while the
near-point dog is ON.
(4) Turn OFF the near-point dog at a sufficient distance from the OP.
Although there is no harm in operation if the near-point dog is turned OFF
during a machine OPR, it is recommended to leave a sufficient distance from
the OP when the near-point dog is turned OFF for the following reason.
If machine OPRs are performed consecutively after the near-point dog is
turned OFF at the time of machine OPR completion, operation will be
performed at the OPR speed until the hardware stroke limit (upper/lower limit)
is reached.
If a sufficient distance cannot be kept, consider the use of the OPR retry
function.
(5) When the stop signal stops the machine OPR, carry out the machine OPR
again. When restart command is turned ON after the stop signal stops the
OPR, the error "OPR restart not possible" (error code: 209) will occur.
(6) After the home position return (OPR) has been started, the zero point of the
encoder must be passed at least once before point A is reached.
However, if selecting "1: Not need to pass servo motor Z-phase after power
on" with "Function selection C-4 (PC17)", it is possible to carry out the home
position return (OPR) without passing the zero point.
ON
1)
5)
4)
3)
2)
Zero signal
Near-point dog OFF
Pr. 50 Setting for the movement amount
after near-point dog ON
[Operation when a machine OPR is started at the
near-point dog ON position]
1) A machine OPR is started.
2) The machine moves at the OPR speed in the
opposite direction of an OPR.
3) Deceleration processing is carried out when
the near-point dog OFF is detected.
4) After the machine stops, a machine OPR is
carried out in the OPR direction.
5) The machine OPR is completed on detection
of the first zero signal after the travel of the
movement amount set to "[Pr.50] Setting for
the movement amount after near-point dog
ON" on detection of the near-point dog signal
ON.
Fig. 8.6 Count method 1) machine OPR on the near-point dog ON position